调整机身并使之线性化
这个例子展示了如何调整和线性化机身。我们首先需要找到电梯偏转和由此产生的调整机身速率(q),这将产生一个给定的关联值,当机身以设定的速度行驶。一旦我们找到了修剪条件,我们就可以推导出修剪条件周围状态的动力学线性模型。
固定参数:入射(Theta)体姿态(U)位置调整稳态参数:电梯偏转(w)体率(q)
生成操作点
打开模型。
scdairframe
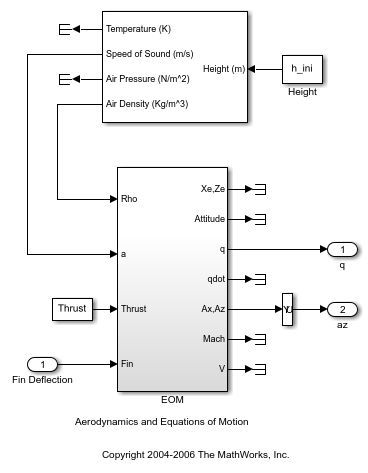
要获得操作点规范对象,可以使用operspec命令:
opspec = operspec (“scdairframe”)
型号scdairframe的工作点规范。(时变组件评估在时间t = 0): - - - - - - - - - - - (1) scdairframe /加工/运动方程(轴)/职位规范:dx = 0,初步猜测:0规范:dx = 0,初步猜测:-3.05 e + 03 (2) scdairframe /加工/运动方程(轴)/θ规范:dx = 0,初步猜测:0 (3)scdairframe /加工/运动方程(轴)/ U, w规范:dx = 0,初步猜测:984规范:dx = 0,初步猜测:0 (4)scdairframe /加工/运动方程(身体轴)/ q规范:dx = 0,初步猜测:0输入:—(1.)scdairframe/Fin挠度初始猜测:0输出:—(1.)scdairframe/q spec: none (2.) scdairframe/az spec: none
首先,我们设置位置状态说明,已知但不处于稳态:
opspec.States (1)。知道= (1,1);opspec.States (1)。稳态= (0,0);
第二种状态是已知的,但不是稳态的:
opspec.States (2)。= 1;opspec.States (2)。稳态= 0;
第三种状态说明包括变量w处于稳态时的体轴角速度:
opspec.States (3)。已知= [1 1];opspec.States (3)。稳态= [0 1];
接下来,我们搜索满足这个规范的操作点。
op = findop (“scdairframe”,opspec);
操作点搜索报告:——scdairframe型号的操作点搜索报告。(t=0时刻评估的时变元件)工作点规格成功满足。状态:- - - - - - - - - - - (1)scdairframe /加工/运动方程(轴)/位置x: 0 dx: 984 x: -3.05 e + 03 dx: 0 (2) scdairframe /加工/运动方程(轴)/θx: 0 dx: -0.00972 (3) scdairframe /加工/运动方程(轴)/ U, w x: 984 dx: 22.7 x: 0 dx: -1.44 e-11 (0) (4) scdairframe /加工/运动方程(轴)/ q x: -0.00972 dx: 1.15 e-16(0)输入:- - - - - - - - - - - (1)scdairframe /鳍偏转U: 0.00142(负无穷到正无穷)输出:- - - - - - - - - - - (1)scdairframe / y问:-0.00972 [-Inf Inf] (2.) scdairframe/az y: -0.242 [-Inf Inf]
线性化模型
工作点现在已经准备好线性化。首先,我们使用以下命令指定输入和输出点:
io (1) = linio (“scdairframe /鳍偏转”,1“输入”);io (2) = linio (“scdairframe /加工”3,“输出”);io (3) = linio ('scdairframe /选择',1“输出”);
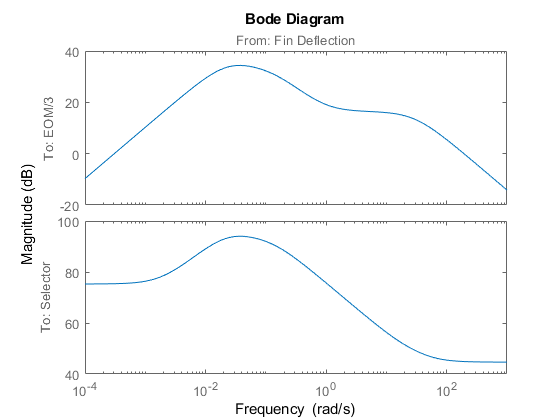
将模型线性化,并绘制出每种情况下的波德星等响应。
SYS =线性化(“scdairframe”op, io);bodemag (sys) bdclose (“scdairframe”)
你也可以从以下列表中选择一个网站: