控制实时PID自动调谐金宝app
部署PID自动调谐器块可以让您在没有Simulink的情况下实时调优系统金宝app®在循环。然而,在Simulink控制实验的同时,在硬件上运行自动调优算法是很有用的。金宝app
一种方法是使用包含PID控制器和PID自动调谐器块的模型,并在外部仿真模式下运行该模型。外部模式允许Simulink块图和由生成的代码构建的独立程序之间进行通信。金宝app在这种模式下,Simulin金宝appk充当了一个实时监控接口,您可以在其中与在硬件上运行的调优算法进行交互。例如,当模型运行时,您可以启动和停止实验,或者从Simulink接口更改调优目标。金宝app
在外部模式调优时,可以只部署实验算法,这样计算的PID调优部分在Simulink中执行。金宝app这样做可以节省目标硬件上的内存。在外部模式下运行PID自动调优算法需要一个代码生成产品,例如金宝app仿真软件编码器™.
金宝app外部模式优化模型
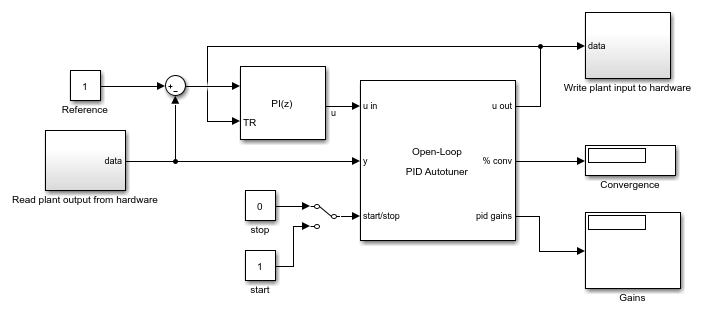
外部金宝app模式下用于PID自动整定的Simulink模型如下图所示。

这里有标记的方块从硬件读取工厂输出和将工厂输入写入硬件表示从物理工厂读取数据或向物理工厂写入数据的硬件接口。当准备好进行调优时,可以在外部模拟模式下运行该模型。
开环调谐的无颠簸转移
当你使用开环PID自动调谐,如果控制器包含积分器动作,则考虑实现信号跟踪,以避免在调谐实验期间积分器上弦。信号跟踪使PID控制器能够继续跟踪真实的植物输入,而它是在环路之外。如果没有它,当控制回路在调优过程的最后关闭时,系统可能会遇到颠簸。
如果你的PID控制器是Simulink金宝appPID控制器块,你可以使用启用跟踪模式参数的控制器块,以避免这个碰撞。下面的图表演示了一个包含开环PID自动调谐块和一个PID控制器块跟踪模式配置。设备输入输入到控制器块的跟踪输入。
对于外部模式调优,可以配置起止信号,如在Simulink中建模的植物的PID自动调谐金宝app.这里演示的模型使用一个带有二进制信号的简单开关手动启动和停止实验。
您还可以配置控制器参数、调优目标和实验参数在Simulink中建模的植物的PID自动调谐金宝app.
运行模型并调整控制器增益
配置完实验块参数后,在模型中,选择外部模式,将模拟时间设置为无限,并运行模型。

金宝appSimulink编译模型并将其部署到连接的硬件上。
如果已配置
启动/停止信号的开始和结束在特定的时间调谐过程,允许模拟运行通过实验结束。如果您已经配置了手册
启动/停止信号,当你的植物达到稳定状态时开始实验。观察信号在% conv输出,当信号稳定到接近100%时停止实验。
调优完成后,检查并验证调优后的增益,如中所述在Simulink中建模的植物的PID自动调谐金宝app.
有关通过Simulink使用外部模式控制自动调优过程的更详细的示例,请参见金宝app用开环PID自整定块实现实时整定PID控制器.
使用外部模式时减少内存占用
自动调谐器模块包含两个模块,一个执行实时频率响应估计,一个使用得到的估计响应来调整PID增益。当您在外部模拟模式中运行包含该金宝app模块的Simulink模型时,默认情况下会部署两个模块。您可以通过只部署估计模块来节省目标硬件上的内存。在本例中,调优算法运行在Simulink主机上,而不是目标硬件上。金宝app要做到这一点,使用减少内存,避免任务溢出选项在自动调谐器块。当选择此选项时,部署的算法使用的内存大约是清除该选项时的三分之一。
PID增益计算比频响估计需要更多的计算负载。对于快速的控制器采样时间,一些硬件可能无法在一个执行周期内完成增益计算。因此,当使用计算能力有限的硬件时,选择这个选项可以让您用快速的采样时间调整PID控制器。
此外,当您启用该选项时,在调优实验结束和新的PID增益到达pid增益输出端口。在将增益推入控制器之前,首先确认在pid增益输出端口代替使用启动/停止信号作为更新的触发器。
谨慎
使用此选项时,必须对模型进行配置,使数值块参数在生成的代码中可调优,而不是内联。要指定可调参数:
在模型编辑器中配置参数,在代码生成>优化,设置默认参数的行为来
可调.在命令行:使用
set_param (mdl DefaultParameterBehavior,可调).
另请参阅
相关的话题
你也可以从以下列表中选择一个网站: