主要内容
仿真快照时气动系统的线性化
此示例显示如何在Simulink控制设计中使用基于时间的操作点快照功能。金宝app该示例使用带压缩空气填充圆筒的动态模型。
气动系统模型
scdpneumaticlin.

获得初始模拟
[t,x,y] = sim('scdpneumaticlin');
绘制仿真结果
在该示例中,闭合供应压力,系统具有0.2MPa的初始压力。供应压力为0.7MPa,在仿真中,伺服阀打开至0.5e-4m。在模拟期间,压力从0.2MPa的初始压力增加,最终在供应压力下稳定。
图(t,y);

收集模拟快照
在模拟使用的各个时刻获取操作点快照
op = condop('scdpneumaticlin',[010 20 30 40 50 60]);
操作点是可以使用的矢量图
OP(2)
模型SCDPneumaticLin的操作点。(在时间t = 10.7245评估的时变组分)状态:----------(1.)SCDPneumaticlin /气缸压力模型/ DPC // DT X:3.12E + 05(2.)SCDPneumaticLin /管道型号/ DPP // DT X:3.13e + 05输入:无----------
操作点现在已准备好进行线性化。首先使用命令指定输入和输出点:
IO(1)= Linio('scdpneumaticlin / x',1,'输入');IO(2)= Linio('scdpneumaticlin /气缸压力模型',1,'输出');
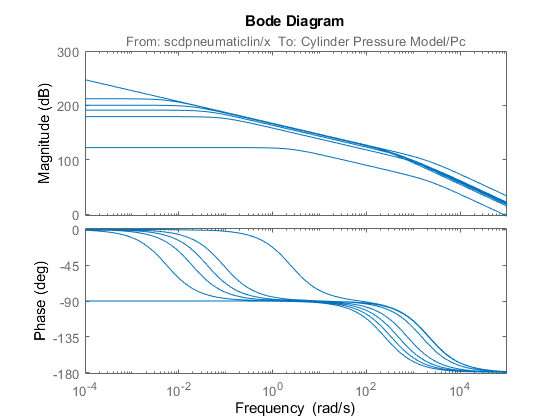
线性化模型并绘制每个条件的Bode图,以查看线性化的可变性。
sys =线性化('scdpneumaticlin',op,io);BODE(SYS)BDCLOSE('scdpneumaticlin')
您还可以从以下列表中选择一个网站: