修剪和线性化机身
此示例显示如何修剪和线性化机身。我们首先需要找到电梯偏转和所得到的修整体速率(Q),当机身以设定速度行进时会产生给定的入射值。找到修剪条件后,我们可以为修剪条件周围的状态的动态推导出线性模型。
固定参数:入射(θ)体姿态(u)位置修整稳态参数:电梯偏转(w)体率(q)
生成工作点
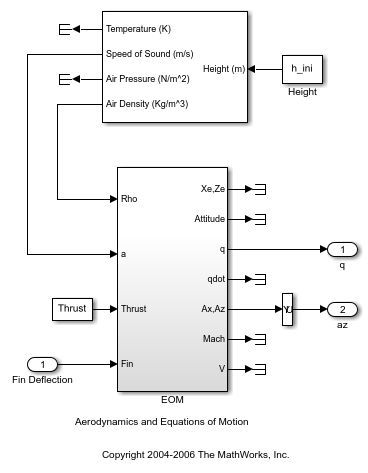
打开模型。
scdairframe.
要获取操作点规范对象,请使用Operspec命令:
opspec = operspec('scdairframe')
模型SCDAirframe的操作点规范。(在时间t = 0评估的时变组件)状态:----------(1.)动作(身体轴)/位置规格的SCDairframe / EOM /方程式:DX = 0,初始猜测:0规格:dx = 0,初始猜测:-3.05e + 03(2.)SCDAirframe / EOM /运动方程式(身体轴)/θ规格:DX = 0,初始猜测:0(3)SCDAirframe / EOM /运动方程(身体轴)/ u,W Spec:DX = 0,初始猜测:984规格:DX = 0,初始猜测:0(4)动作(主体轴)/ Q规格的SCDAirframe / EOM /方程式(身体轴)/ Q规格:dx = 0,初始猜测:0输入:----------(1.)SCDAirframe / Fin偏转初始猜测:0输出:----------(1.)SCDAirframe /q SPEM:无(2.)SCDAirFrame / AZ规范:无
首先,我们设置了已知但不处于稳态状态的位置状态规范:
opspec.states(1).known = [1; 1];opspec.states(1).steadystate = [0; 0];
第二州规范是θ,但没有处于稳定状态:
opspec.states(2).known = 1;opspec.states(2).steadystate = 0;
第三状态规范包括体轴角速率,其中变量W处于稳态:
opspec.states(3).known = [1 1];opspec.states(3).steadystate = [0 1];
接下来,我们搜索符合此规范的操作点。
op = condop('scdairframe',opspec);
操作点搜索报告:----------------------------------操作点搜索模型SCDAirframe的报告。(在时间t = 0评估的时变组分)成功满足操作点规范。州:----------(1.)运动框架/ EOM /运动方程式/运动轴/位置X:0 DX:984 X:-3.05E + 03 DX:0(2.)SCDAirframe/EOM/ Equations of Motion (Body Axes)/Theta x: 0 dx: -0.00972 (3.) scdairframe/EOM/ Equations of Motion (Body Axes)/U,w x: 984 dx: 22.7 x: 0 dx: -1.44e-11 (0) (4.) scdairframe/EOM/ Equations of Motion (Body Axes)/q x: -0.00972 dx: 1.72e-16 (0) Inputs: ---------- (1.) scdairframe/Fin Deflection u: 0.00142 [-Inf Inf] Outputs: ---------- (1.) scdairframe/q y: -0.00972 [-Inf Inf] (2.) scdairframe/az y: -0.242 [-Inf Inf]
线性化模型
操作点现在可以进行线性化了。首先,我们使用以下命令指定输入和输出点:
IO(1)= Linio('scdairframe / fin偏转',1,'输入');IO(2)= Linio('scdairframe / eom',3,'输出');IO(3)= Linio(“scdairframe /选择器”,1,'输出');
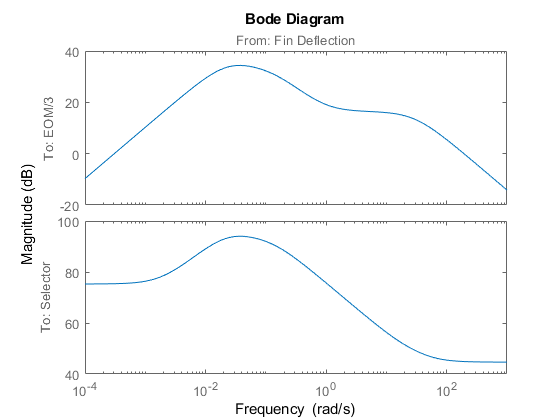
线性化模型,并对每个条件绘制Bode幅度响应。
sys =线性化('scdairframe'op, io);bodemag (sys) bdclose ('scdairframe')
您还可以从以下列表中选择一个网站: