主要内容
BNO055 IMU传感器
测量加速度、角速率和磁场,并沿BNO055传感器的轴计算融合值,如欧拉角、四元数、线加速度和重力矢量
- 图书馆:
金宝app针对Ar金宝appduino硬件/传感器的Simulink支持包
描述
这个BNO055 IMU传感器块从连接到硬件的BNO055 IMU传感器读取数据。块有两种操作模式:非融合和融合。
块在非融合和融合模式下沿传感器轴输出加速度、角速率和磁场强度。在融合模式下,块还以欧拉角或四元数的形式输出传感器的方向,以及传感器的线性加速度、重力矢量和校准状态。这些值发出非融合模式下的ted为原始值,而融合模式下发出的值为校准值。块将四元数和校准状态以外的所有值输出为3×1的数据数组双重的数据类型。四元数是一个4乘1的数组双重的数据类型,并且校准状态是一个4×1的int8数据类型。
如果模拟的模型包含BNO055 IMU传感器块在不连接硬件的情况下,块输出零。有关详细信息,请参阅块在模拟中生成零或不执行任何操作.
港口
输出
参数
更多关于
校准磁强计
要完全校准Adafruit内的磁强计®BNO055传感器:
保持传感器与地面平行,并按图8的模式移动传感器。
笔记
确保传感器远离任何磁干扰。

运行Simulin金宝appk模型并读取磁强计的校准状态。
重复此过程,直到磁强计的校准值
3..

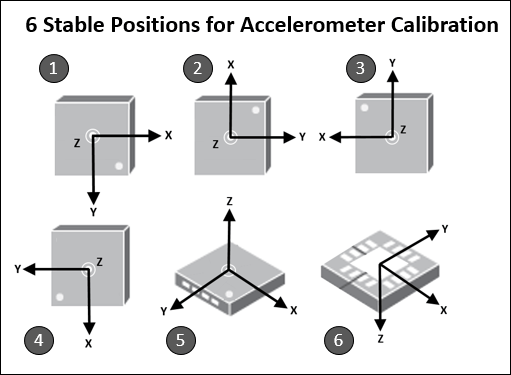
校准加速度计
要完全校准ADABNO055传感器内的加速计:
将Adafruit BNO055传感器分别置于这六个稳定位置几秒钟。
运行Simulin金宝appk模型并读取加速计的校准状态。
重复此过程,直到加速计的校准值
3..

另见
在R2018b中引入
您还可以从以下列表中选择网站:
