PX4 PWM输出
配置伺服电机和ESC控制的PWM输出
- 库:
无人机工具箱支持包的PX金宝app4自动驾驶/ PX4实用块

描述
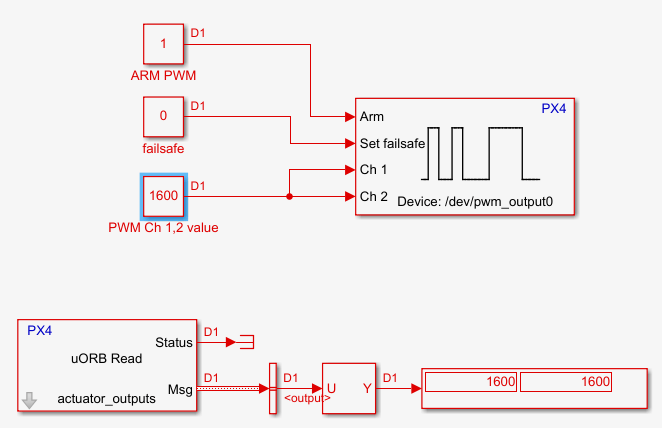
的PX4 PWM输出模块帮助您配置从PX4飞行控制器板PWM输出。该块接受时间值(以微秒为单位),表示一个特定通道的PWM信号的开启周期,并将其传递给板上相应的PWM通道。
的PX4 PWM输出块还接受信号用于装备飞行控制器和启用故障安全条件。
请注意
一个限制是观察到当PX4 PWM输出块部署在Pixhawk 1板上,如果你选择使用默认启动脚本(rcS)作为在该PX4自动驾驶仪的启动脚本选项在PX4选择系统启动脚本步骤。然后,如果你使用rcS作为Pixhawk 1的启动脚本,PWM模块将无法正常工作。这个限制是不存在用于Pixhawk 2.1(立方),Pixracer和Pixhawk 4个板。这些自动驾驶仪,即使在部署后的PWM模块的工作原理rcS作为启动脚本。
港口
输入
输出
Port_1- 错误状态而处理PWM指令
0(默认)|16位值
获得该块中的PWM操作的错误状态。错误状态对应于不同的可能的错误的16位表示。
的输出值0表示成功的PWM操作(没有错误)。非零输出表明您可以解释基于16位值的不同的错误。
要解释的错误(如果有的话),连接Port_1输出到显示块,它包含格式参数值设置为二进制(存储整数),并运行在外部模式的典范。
Port_1(错误状态)连接到Display块,并在外部模式下查看

使用下面的表作为从PX4 PWM输出块的输出端获得解释16位错误状态:
| 16位字段的LSB设置为1(当出现错误时,它将出现在Display块中) | 错误 |
|---|---|
| 1 | 无法打开PWM器件(Main/AUX) |
| 2 | 未能获得伺服马达的数量 |
| 3. | 无法武装PWM设备 |
| 4 | 无法解除PWM装置 |
| 5 | 无法设置PWM频率 |
| 6 | 无法选择被配置为输入所述PWM信道 |
| 7 | 在选定的通道上设置故障安全值(在主要脉宽调制或者AUX PWM在配置参数对话框的窗格) |
| 8 | 无法对所选择的信道(在中定义的值的解除值主要脉宽调制或者AUX PWM在配置参数对话框的窗格) |
| 9 | 无法解释设置故障安全输入 |
| 10 | 无法解释强制终止故障安全模式输入 |
| 11 | 无法设置PWM电机值 |
| 12 | 复位PWM电机失败。处理步骤 |
| 13 | 关闭PWM器件失败(Main/AUX) |
例如: 如果16位的错误状态显示[ 如果16位的错误状态显示[ |
|
依赖关系
如果您选择了这种输出仅显示输出错误状态参数。
数据类型:uint16
参数
选择PWM器件-通道类别,以确定您要选择的通道
主(默认)|奥克斯
选择类别(主或辅)识别并选择相应的通道。选择该类别后,可在参数列表中分别选择“主通道”和“AUX通道”。
PWM渠道-要发送PWM ON时间值的通道
信道数
选择您想要发送PWM ON时间值的通道(连接伺服电机或ESC的通道)。的Ch输入到块出现基于在该参数列表的选择。
请注意
确保您选择了属于同一频道组的所有频道。如果需要连接不同组的PWM通道,请选择所有所需组中的所有通道。在整个Simulink模型中,每个通道类别(主或AUX)只允许一个PX4 PWM输出块。金宝app
提示
要在Pixhawk系列飞行控制器板中识别频道组,请使用主机上的QGroundControl应用程序:
QGroundControl开放。
将Pixhawk系列飞行控制器板连接到主机的USB端口。
在QGroundControl,去Mavlink控制台,并做以下工作:
认主通道及其团体,输入命令
脉宽调制信息.要识别Aux通道及其组,输入命令
-d /dev/pwm_output1 . PWM信息

强制终止故障安全模式- 设置故障安全作为永久的和不可恢复
离开(默认)|在
如果启用此参数,如果实际的故障安全情况发生时,故障安全值永久设置。在这种情况下,发送一个禁止信号(0)设置故障安全投入,不会有任何影响。
请注意
如果您正在使用PX4固件1.10.2,的实现强制终止故障安全模式如果您使用的PWM AUX通道参数无效。
输出错误状态—将错误状态设置为输出
离开(默认)
使能块的错误状态作为输出。这个输出是一个16位的二进制值,您可以对其进行解释以分析错误。
模型的例子
另请参阅
您还可以从以下列表中选择一个网站: