Main Content
造型
准备硬件连接的模型,添加块以支持PX4 Autopilot金宝app
块
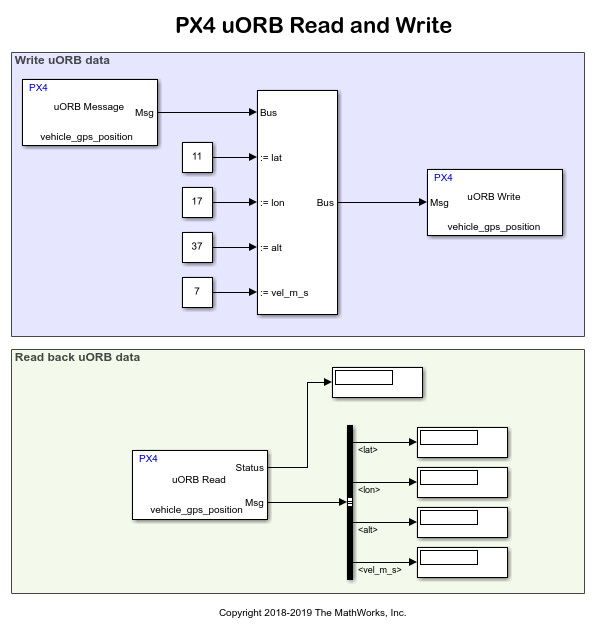
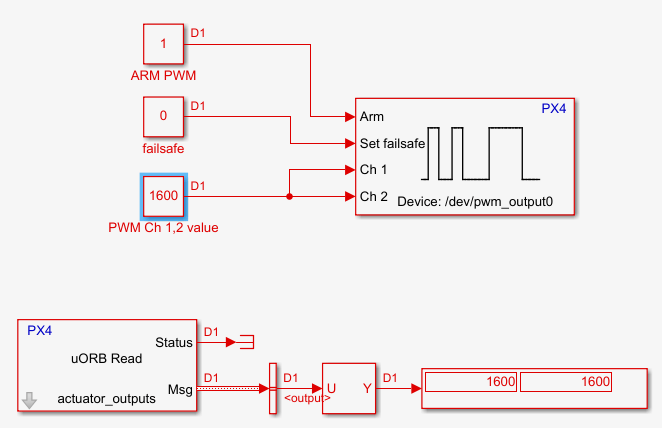
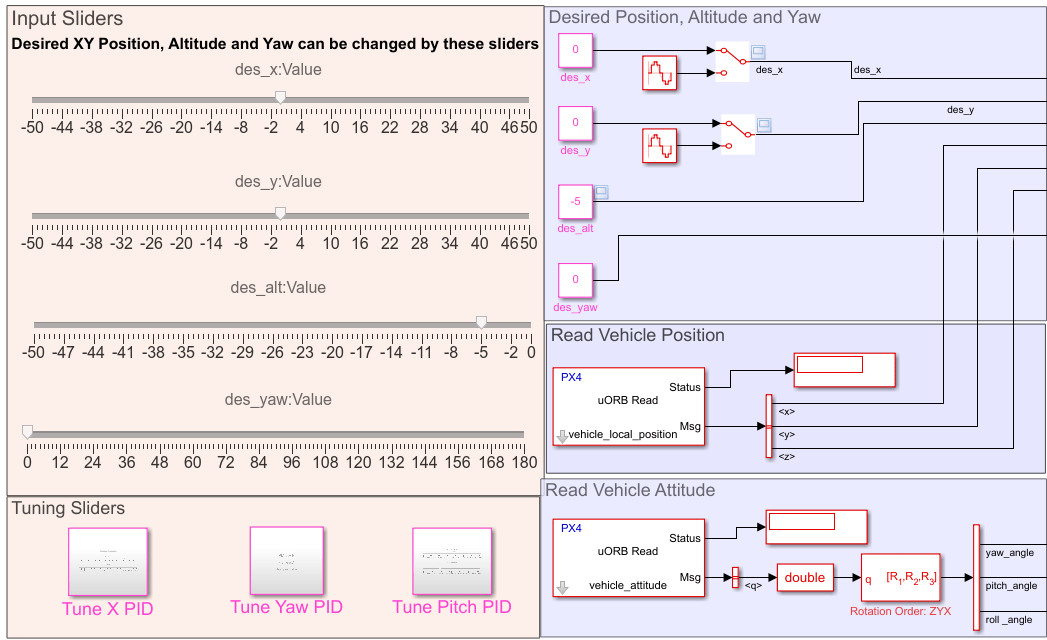
| PX4 UORB阅读 | 阅读指定UORB主题的UORB数据 |
| PX4 uORB Write | Write uORB data for the specified uORB topic |
| PX4 UORB消息 | 使用指定的UORB主题创建空白消息 |
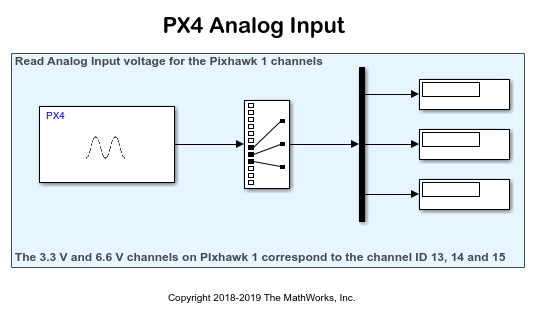
| PX4模拟输入 | 测量应用于ADC通道的模拟电压 |
| PX4 PWM输出 | 为伺服电机配置PWM输出和ESC控制 |
| PX4读取位置设定点 | 阅读由UORB主题中PX4 Navigator模块发布的位置设定点position_setpoint_triplet |
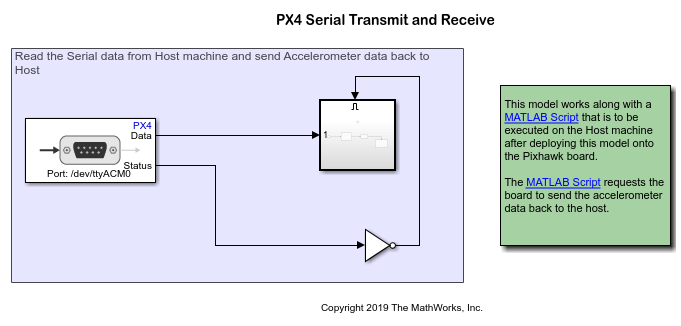
| 连续接收 | Read data from UART or USART port on PX4 flight controller |
| 串行发射 | 将序列数据发送到UART或USART端口 |
| Vehicle Attitude | Read vehicle_odometry uORB topic and obtain attitude measurements |
| 加速度计 | Read sensor_accel uORB topic and obtain three dimensional linear acceleration |
| 陀螺仪 | 阅读Sensor_gyro Uorb主题并获得三维旋转速率 |
| 磁力计 | 阅读Sensor_mag Uorb主题并获得三维磁场 |
| Radio Control Transmitter | 读取input_rc uorb主题以获取无线电控制发射机的数据 |
| 读取参数 | Read PX4 system parameters |
| 电池 | 阅读Battery_status UORB主题并获取有关电池状态的详细信息 |
| I2C主写 | 将数据写入I2C从设备或I2C从设备寄存器 |
| I2C Master Read | Read data from I2C slave device or I2C slave device register |
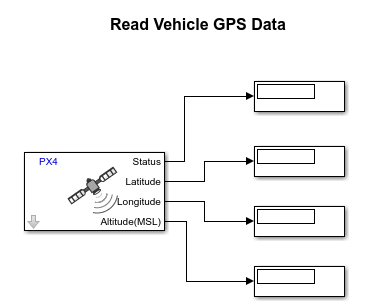
| 全球定位系统 | 读取车辆_gps_position uorb主题并获得GPS坐标 |
职能
GetMatfilesFrompixHawk |
从插入Pixhawk硬件板上的SD卡中检索垫子 |
px4MATFilestitcher |
将从SD卡检索到单个垫子文件中的多个垫子 |
话题
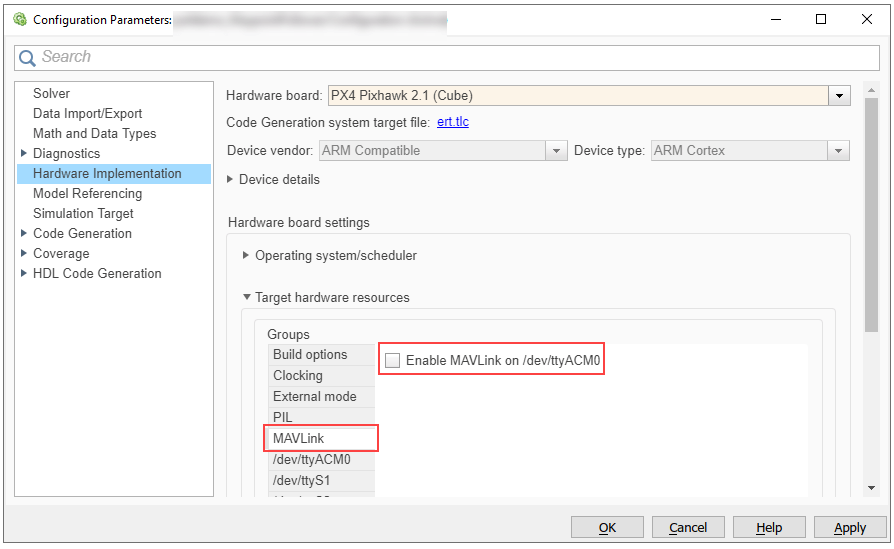
在PX4上创建和运行应用程序的参数和配置选项®flight controller
Index Numbers for Analog Channels on Pixhawk Series Controller Boards
Identify the index numbers for signals from analog channels
Identify the UART/USART port number for the labels seen on PX4 flight controller boards
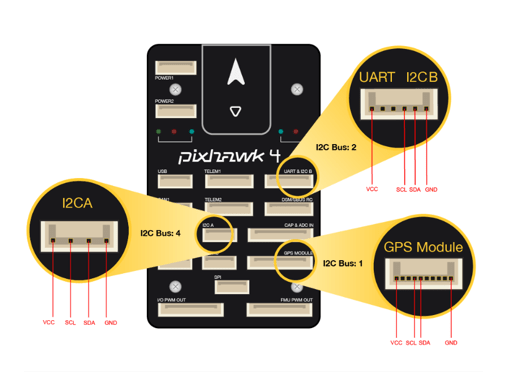
I2C Bus Port Numbers for Labels on PX4 Autopilots
Identify the bus port number for the labels seen on PX4 flight controller boards
特色示例



You can also select a web site from the following list:
美洲
- América Latina(Español)
- 加拿大(英语)
- 美国(英语)