解微分代数方程(DAEs)GYDF4y2Ba
此示例演示如何使用MATLAB®和符号数学工具箱求解微分代数方程(DAE)™.GYDF4y2Ba
涉及函数或状态变量的微分代数方程,GYDF4y2Ba 有表格吗GYDF4y2Ba
哪里GYDF4y2Ba 是自变量。方程的个数GYDF4y2Ba 必须匹配状态变量的数量GYDF4y2Ba .GYDF4y2Ba
因为大多数DAE系统不适合直接输入到MATLAB®解算器,例如GYDF4y2Baode15iGYDF4y2Ba,首先使用Symbolic Math Toolbox™功能将它们转换为合适的形式。该功能将DAE的微分索引(将系统降至ode所需的微分数)降低为1或0,然后将DAE系统转换为适合MATLAB®求解器的数字函数句柄。然后,使用MATLAB®求解器,如GYDF4y2Baode15iGYDF4y2Ba,GYDF4y2Baode15sGYDF4y2Ba或GYDF4y2Baode23tGYDF4y2Ba,以解决dae。GYDF4y2Ba
通过完成以下步骤解决DAE系统问题。GYDF4y2Ba
步骤1:指定方程和变量GYDF4y2Ba
下图通过解决摆锤的DAE来显示DAE工作流。GYDF4y2Ba

状态变量为:GYDF4y2Ba
摆的水平位置GYDF4y2Ba
摆锤垂直位置GYDF4y2Ba
防止钟摆飞走的力GYDF4y2Ba
变量包括:GYDF4y2Ba
摆锤质量GYDF4y2Ba
摆长GYDF4y2Ba
引力常数GYDF4y2Ba
DAE方程组为:GYDF4y2Ba
使用指定自变量和状态变量GYDF4y2Ba符号GYDF4y2Ba.GYDF4y2Ba
符号GYDF4y2Bax(t)GYDF4y2Bay(t)GYDF4y2BaT (T)GYDF4y2BaMGYDF4y2BaRGYDF4y2BaGGYDF4y2Ba
使用==运算符指定方程式。GYDF4y2Ba
方程n1=m*diff(x(t),2)==t(t)/r*x(t);方程n2=m*diff(y(t),2)==t(t)/r*y(t)-m*g;方程n3=x(t)^2+y(t)^2==r^2;eqns=[eqn1 eqn2 eqn3];GYDF4y2Ba
将状态变量放在列向量中。存储原始变量的数量以供参考。GYDF4y2Ba
var = [x (t);y (t);T (T)];origVars =长度(var);GYDF4y2Ba
步骤2:降低差阶GYDF4y2Ba
2.1(可选)检查变量的发生率GYDF4y2Ba
这一步很简单GYDF4y2Ba可选择的GYDF4y2Ba。您可以通过查看关联矩阵来检查变量在DAE系统中出现的位置。此步骤将查找输入中未出现且可以从DAE系统中删除的任何变量GYDF4y2Ba瓦尔斯GYDF4y2Ba向量。GYDF4y2Ba
使用显示关联矩阵GYDF4y2Ba发病率矩阵GYDF4y2Ba. 产量GYDF4y2Ba发病率矩阵GYDF4y2Ba每个方程有一行,每个变量有一列。因为系统有三个方程和三个状态变量,GYDF4y2Ba发病率矩阵GYDF4y2Ba返回一个GYDF4y2Ba3.GYDF4y2Ba——- - - - - -GYDF4y2Ba3.GYDF4y2Ba矩阵矩阵有GYDF4y2Ba1.GYDF4y2Bas和GYDF4y2Ba0GYDF4y2Bas、 在哪里GYDF4y2Ba1.GYDF4y2Bas表示状态变量的出现GYDF4y2Ba1.GYDF4y2Ba在适当的位置GYDF4y2Ba(2,3)GYDF4y2Ba表示第二个等式包含第三个状态变量GYDF4y2BaT (T)GYDF4y2Ba.GYDF4y2Ba
M=发病率矩阵(等式、变量)GYDF4y2Ba
M=GYDF4y2Ba3×3GYDF4y2Ba1 0 1 0 1 1 1 1 0GYDF4y2Ba
如果关联矩阵的一列为allGYDF4y2Ba0GYDF4y2Bas、 然后,该状态变量不会出现在DAE系统中,应将其删除。GYDF4y2Ba
2.2降低微分阶数GYDF4y2Ba
这个GYDF4y2Ba微分阶GYDF4y2BaDAE系统的阶数是其方程的最高微分阶。要使用MATLAB求解DAE,必须将微分阶降至GYDF4y2Ba1.GYDF4y2Ba. 这里,第一和第二个方程具有GYDF4y2Bax(t)GYDF4y2Ba和GYDF4y2Bay(t)GYDF4y2Ba. 因此,微分阶是GYDF4y2Ba2.GYDF4y2Ba.GYDF4y2Ba
将系统简化为一阶系统,用GYDF4y2Ba还原分化领主GYDF4y2Ba.这个GYDF4y2Ba还原分化领主GYDF4y2Ba函数用新的变量代替导数,例如GYDF4y2BaDxt(t)GYDF4y2Ba和GYDF4y2BaDyt (t)GYDF4y2Ba. 中表达式的右侧GYDF4y2Ba命令GYDF4y2Ba是GYDF4y2Ba0GYDF4y2Ba.GYDF4y2Ba
[eqns,vars]=还原微分主(eqns,vars)GYDF4y2Ba
等式=GYDF4y2Ba
瓦尔斯=GYDF4y2Ba
步骤3:检查并降低差速器索引GYDF4y2Ba
3.1检查系统的差分指标GYDF4y2Ba
使用检查DAE系统的差异索引GYDF4y2BaisLowIndexDAEGYDF4y2Ba。如果索引为GYDF4y2Ba0GYDF4y2Ba或GYDF4y2Ba1.GYDF4y2Ba然后GYDF4y2BaisLowIndexDAEGYDF4y2Ba返回逻辑GYDF4y2Ba1.GYDF4y2Ba(GYDF4y2Ba符合事实的GYDF4y2Ba)您可以跳过步骤3.2,转到步骤4。将DAE系统转换为MATLAB函数句柄。在这里GYDF4y2BaisLowIndexDAEGYDF4y2Ba返回逻辑GYDF4y2Ba0GYDF4y2Ba(GYDF4y2Ba错误的GYDF4y2Ba),这意味着差异指数大于GYDF4y2Ba1.GYDF4y2Ba而且必须减少。GYDF4y2Ba
isLowIndexDAE(等式、变量)GYDF4y2Ba
ans=GYDF4y2Ba必然的GYDF4y2Ba0GYDF4y2Ba
3.2用求微分指标GYDF4y2Ba还原指数GYDF4y2Ba
要减少差异指数,请使用GYDF4y2Ba还原指数GYDF4y2Ba函数添加从输入方程导出的新方程,然后用新变量替换高阶导数。如果GYDF4y2Ba还原指数GYDF4y2Ba失败并发出警告,然后使用替代功能GYDF4y2Ba还原电极GYDF4y2Ba如工作流中所述GYDF4y2Ba求解半线性DAE系统GYDF4y2Ba.GYDF4y2Ba
减少所述DAE的差异索引GYDF4y2Ba命令GYDF4y2Ba和GYDF4y2Ba瓦尔斯GYDF4y2Ba.GYDF4y2Ba
[DAE,DAEVAR]=简化的EINDEX(等式,变量)GYDF4y2Ba
DAE=GYDF4y2Ba
DAEvars =GYDF4y2Ba
如果GYDF4y2Ba还原指数GYDF4y2Ba如果出现错误或警告,请使用中描述的替代工作流GYDF4y2Ba求解半线性DAE系统GYDF4y2Ba.GYDF4y2Ba
经常GYDF4y2Ba还原指数GYDF4y2Ba引入可以消除的冗余方程和变量。使用消除多余的方程和变量GYDF4y2Ba还原还原GYDF4y2Ba.GYDF4y2Ba
[DAE,DAEvars]=减少冗余(DAE,DAEvars)GYDF4y2Ba
DAE=GYDF4y2Ba
DAEvars =GYDF4y2Ba
检查新系统的微分指数。现在,GYDF4y2BaisLowIndexDAEGYDF4y2Ba返回逻辑GYDF4y2Ba1.GYDF4y2Ba(GYDF4y2Ba符合事实的GYDF4y2Ba),表示系统的微分指标为GYDF4y2Ba0GYDF4y2Ba或GYDF4y2Ba1.GYDF4y2Ba.GYDF4y2Ba
isLowIndexDAE(DAE、DAEVAR)GYDF4y2Ba
ans=GYDF4y2Ba必然的GYDF4y2Ba1.GYDF4y2Ba
步骤4:转换DAE系统到MATLAB函数句柄GYDF4y2Ba
此步骤为MATLAB®ODE解算器创建函数句柄GYDF4y2Baode15iGYDF4y2Ba,这是一个通用解算器。使用专门的质量矩阵解算器,如GYDF4y2Baode15sGYDF4y2Ba和GYDF4y2Baode23tGYDF4y2Ba看见GYDF4y2Ba使用质量矩阵解算器求解DAEGYDF4y2Ba和GYDF4y2Ba选择一个ODE解算器GYDF4y2Ba(MATLAB)。GYDF4y2Ba
还原指数GYDF4y2Ba输出一个向量的方程GYDF4y2Ba代数微分方程GYDF4y2Ba和一个变量向量GYDF4y2Ba代瓦尔斯GYDF4y2Ba.使用GYDF4y2Baode15iGYDF4y2Ba,您需要一个描述DAE系统的函数句柄。GYDF4y2Ba
首先,本文中的方程GYDF4y2Ba代数微分方程GYDF4y2Ba可以包含变量向量中未指定的符号参数GYDF4y2Ba代瓦尔斯GYDF4y2Ba. 通过使用查找这些参数GYDF4y2Ba塞迪夫GYDF4y2Ba关于GYDF4y2Ba赛姆瓦尔GYDF4y2Ba从GYDF4y2Ba代数微分方程GYDF4y2Ba和GYDF4y2Ba代瓦尔斯GYDF4y2Ba.GYDF4y2Ba
pDAEs=symvar(DAEs);pDAEvars=symvar(DAEvars);extraParams=setdiff(pDAEs,pDAEvars)GYDF4y2Ba
外参数=GYDF4y2Ba
需要指定的额外参数是质量GYDF4y2BaMGYDF4y2Ba半径GYDF4y2BaRGYDF4y2Ba,和引力常数GYDF4y2BaGGYDF4y2Ba.GYDF4y2Ba
使用GYDF4y2BadaeFunctionGYDF4y2Ba。将额外的符号参数指定为的附加输入参数GYDF4y2BadaeFunctionGYDF4y2Ba.GYDF4y2Ba
f=DAE函数(DAE、DAEvars、g、m、r);GYDF4y2Ba
工作流的其余部分纯粹是数字。设置参数值并为其创建函数句柄GYDF4y2Baode15iGYDF4y2Ba.GYDF4y2Ba
g=9.81;m=1;r=1;F=@(t,Y,YP)F(t,Y,YP,g,m,r);GYDF4y2Ba
步骤5:查找解算器的初始条件GYDF4y2Ba
这个GYDF4y2Baode15iGYDF4y2Ba解算器需要函数句柄中所有变量的初始值。使用MATLAB查找满足方程的初始值GYDF4y2Ba分贝GYDF4y2Ba作用GYDF4y2Ba分贝GYDF4y2Ba接受对初始条件的猜测(可能不满足方程式),并尝试使用这些猜测找到令人满意的初始条件。GYDF4y2Ba分贝GYDF4y2Ba可能会失败,在这种情况下,必须手动为问题提供一致的初始值。GYDF4y2Ba
首先,检查中的变量GYDF4y2Ba代瓦尔斯GYDF4y2Ba.GYDF4y2Ba
代瓦尔斯GYDF4y2Ba
DAEvars =GYDF4y2Ba
在这里GYDF4y2BaDxt(t)GYDF4y2Ba是的一阶导数GYDF4y2Bax(t)GYDF4y2Ba,GYDF4y2Ba戴特(t)GYDF4y2Ba是的二阶导数GYDF4y2Bay(t)GYDF4y2Ba,依此类推。一个表中有7个变量GYDF4y2Ba7.GYDF4y2Ba——- - - - - -GYDF4y2Ba1.GYDF4y2Ba矢量。因此,对变量及其导数的初始值的猜测也必须是正确的GYDF4y2Ba7.GYDF4y2Ba——- - - - - -GYDF4y2Ba1.GYDF4y2Ba向量。GYDF4y2Ba
假设摆锤的初始角位移为30°或GYDF4y2Bapi/6GYDF4y2Ba,坐标原点位于摆锤的悬挂点。考虑到我们使用了半径GYDF4y2BaRGYDF4y2Ba属于GYDF4y2Ba1.GYDF4y2Ba,初始水平位置GYDF4y2Bax(t)GYDF4y2Ba是GYDF4y2Bar*sin(pi/6)GYDF4y2Ba. 初始垂直位置GYDF4y2Bay(t)GYDF4y2Ba是GYDF4y2Ba-r*cos(pi/6)GYDF4y2Ba. 指定向量中变量的这些初始值GYDF4y2Bay0estGYDF4y2Ba.GYDF4y2Ba
任意将剩余变量及其导数的初始值设置为GYDF4y2Ba0GYDF4y2Ba。这些不是很好的猜测。但是,它们足以解决这个问题。在您的问题中,如果GYDF4y2Ba分贝GYDF4y2Ba错误,然后提供更好的猜测并参考GYDF4y2Ba分贝GYDF4y2Ba.GYDF4y2Ba
y0est=[r*sin(pi/6);-r*cos(pi/6);0;0;0;0;0;0];yp0est=0(7,1);GYDF4y2Ba
创建一个选项集,指定数值搜索的数值公差。GYDF4y2Ba
opt=odeset(GYDF4y2Ba“雷托”GYDF4y2Ba, 10.0^(-7),GYDF4y2Ba“Absol”GYDF4y2Ba,10.0^(-7));GYDF4y2Ba
通过使用GYDF4y2Ba分贝GYDF4y2Ba.GYDF4y2Ba
[y0,yp0]=decic(F,0,y0est,[],yp0est,[],opt)GYDF4y2Ba
y0=GYDF4y2Ba7×1GYDF4y2Ba0.4771 -0.8788 -8.6214 0 0.0000 -2.2333 -4.1135GYDF4y2Ba
yp0=GYDF4y2Ba7×1GYDF4y2Ba0 0.0000 0 0 -2.2333 0 0GYDF4y2Ba
步骤6:解决dae使用GYDF4y2Baode15iGYDF4y2Ba
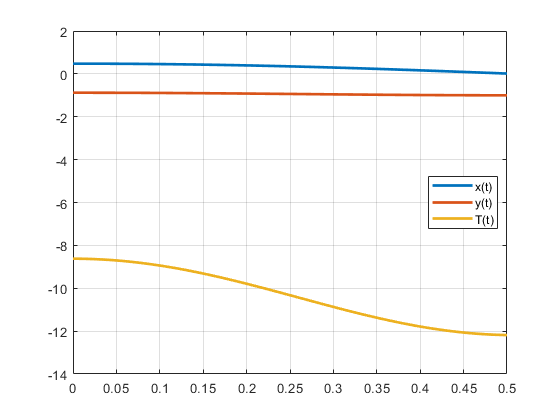
解决系统在时间跨度内的集成问题GYDF4y2Ba0GYDF4y2Ba≤GYDF4y2BaTGYDF4y2Ba≤GYDF4y2Ba0.5GYDF4y2Ba. 将网格线和图例添加到绘图中。GYDF4y2Ba
[tSol,ySol]=ode15i(F[0.5],y0,yp0,opt);绘图(tSol、ySol(:,1:origVars),GYDF4y2Ba“线宽”GYDF4y2Ba, 2)GYDF4y2Ba对于GYDF4y2Bak=1:origVars S{k}=char(DAEvars(k));GYDF4y2Ba终止GYDF4y2Ba图例,GYDF4y2Ba“位置”GYDF4y2Ba,GYDF4y2Ba“最好的”GYDF4y2Ba)网格GYDF4y2Ba在…上GYDF4y2Ba
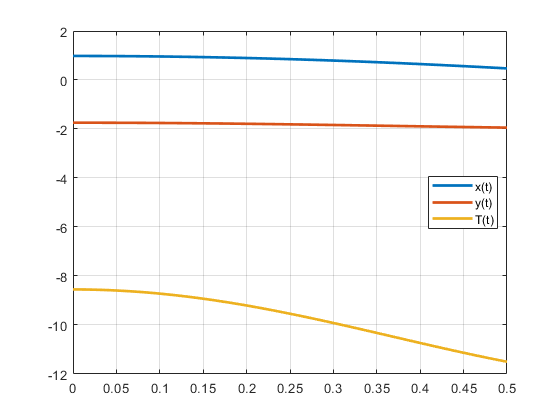
通过设置新值并重新生成函数句柄和初始条件,解决系统中不同参数值的问题。GYDF4y2Ba
设置GYDF4y2BaRGYDF4y2Ba到GYDF4y2Ba2.GYDF4y2Ba并重新生成函数句柄和初始条件。GYDF4y2Ba
r=2;F=@(t,Y,YP)F(t,Y,YP,g,m,r);y0est=[r*sin(pi/6);-r*cos(pi/6);0;0;0;0;0;0];[y0,yp0]=decic(F,0,y0est,[],yp0est,[],opt);GYDF4y2Ba
为新参数值求解系统。GYDF4y2Ba
[tSol,y] = ode15i(F,[0 0.5],y0,yp0,opt);情节(tSol, y (: 1: origVars),GYDF4y2Ba“线宽”GYDF4y2Ba, 2)GYDF4y2Ba对于GYDF4y2Bak=1:origVars S{k}=char(DAEvars(k));GYDF4y2Ba终止GYDF4y2Ba图例,GYDF4y2Ba“位置”GYDF4y2Ba,GYDF4y2Ba“最好的”GYDF4y2Ba)网格GYDF4y2Ba在…上GYDF4y2Ba
相关话题GYDF4y2Ba
选择一个网站GYDF4y2Ba
选择一个网站以获取可用的翻译内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:GYDF4y2Ba.GYDF4y2Ba
选择GYDF4y2Ba网站GYDF4y2Ba您还可以从以下列表中选择网站:GYDF4y2Ba
美洲GYDF4y2Ba
- 美国拉丁GYDF4y2Ba(西班牙人)GYDF4y2Ba
- 加拿大GYDF4y2Ba(英文)GYDF4y2Ba
- 美国GYDF4y2Ba(英文)GYDF4y2Ba
欧洲GYDF4y2Ba
- 比利时GYDF4y2Ba(英文)GYDF4y2Ba
- 丹麦GYDF4y2Ba(英文)GYDF4y2Ba
- 德国GYDF4y2Ba(德国)GYDF4y2Ba
- 埃斯帕尼亚GYDF4y2Ba(西班牙人)GYDF4y2Ba
- 芬兰GYDF4y2Ba(英文)GYDF4y2Ba
- 法国GYDF4y2Ba(法兰西)GYDF4y2Ba
- 爱尔兰GYDF4y2Ba(英文)GYDF4y2Ba
- 意大利GYDF4y2Ba(意大利语)GYDF4y2Ba
- 卢森堡GYDF4y2Ba(英文)GYDF4y2Ba
- 荷兰GYDF4y2Ba(英文)GYDF4y2Ba
- 挪威GYDF4y2Ba(英文)GYDF4y2Ba
- ÖsterreichGYDF4y2Ba(德国)GYDF4y2Ba
- 葡萄牙GYDF4y2Ba(英文)GYDF4y2Ba
- 瑞典GYDF4y2Ba(英文)GYDF4y2Ba
- 瑞士GYDF4y2Ba
- 联合王国GYDF4y2Ba(英文)GYDF4y2Ba
亚太地区GYDF4y2Ba
- 澳大利亚GYDF4y2Ba(英文)GYDF4y2Ba
- 印度GYDF4y2Ba(英文)GYDF4y2Ba
- 新西兰GYDF4y2Ba(英文)GYDF4y2Ba
- 中国GYDF4y2Ba
- 日本GYDF4y2Ba(日本語)GYDF4y2Ba
- 한국GYDF4y2Ba(한국어)GYDF4y2Ba