求解半线性DAE系统gydF4y2Ba
该工作流是求解半线性微分代数方程(DAEs)的替代工作流,仅当gydF4y2BareduceDAEIndexgydF4y2Ba在标准工作流中失败,并发出警告消息:gydF4y2Ba还原的DAEs指数大于1。[daetools: reduceDAEIndex):gydF4y2Ba.有关标准工作流,请参见gydF4y2Ba解微分代数方程(DAEs)gydF4y2Ba.gydF4y2Ba
完成步骤1和步骤2gydF4y2Ba解微分代数方程(DAEs)gydF4y2Ba在开始其他步骤之前。然后,在步骤3中,如果gydF4y2BareduceDAEIndexgydF4y2Ba失败时,减少差异索引使用gydF4y2BareduceDAEToODEgydF4y2Ba.的优势gydF4y2BareduceDAEToODEgydF4y2Ba它可靠地将半线性DAEs简化为ode(指数DAEsgydF4y2Ba0gydF4y2Ba).然而,这个函数速度较慢,并且只适用于半线性DAE系统。gydF4y2BareduceDAEToODEgydF4y2Ba如果系统不是半线性的,就会失败。gydF4y2Ba
要解决DAE系统,请完成以下步骤。gydF4y2Ba
步骤1。指定方程和变量gydF4y2Ba
DAE方程组为:gydF4y2Ba
使用。指定自变量和状态变量gydF4y2Ba信谊gydF4y2Ba.gydF4y2Ba
信谊gydF4y2Bax (t)gydF4y2Bay (t)gydF4y2BaT (T)gydF4y2Ba米gydF4y2BargydF4y2BaggydF4y2Ba
使用==运算符指定方程。gydF4y2Ba
eqn1 = m*diff(x(t), 2) = t (t)/r*x(t);m*diff(y(t), 2) == t (t)/r*y(t) - m*g;y(t)^2 = r^2;Eqns = [eqn1 eqn2 eqn3];gydF4y2Ba
将状态变量放入列向量中。存储原始变量的数量以供参考。gydF4y2Ba
var = [x (t);y (t);T (T)];origVars =长度(var);gydF4y2Ba
步骤2。降低微分阶gydF4y2Ba
的gydF4y2Ba微分阶gydF4y2Ba的微分方程是其方程的最高微分阶。用MATLAB求解DAEs时,微分阶必须降为gydF4y2Ba1gydF4y2Ba.这里,一阶和二阶方程有二阶导数gydF4y2Bax (t)gydF4y2Ba和gydF4y2Bay (t)gydF4y2Ba.因此,微分阶为gydF4y2Ba2gydF4y2Ba.gydF4y2Ba
将系统简化为一阶系统,用gydF4y2BareduceDifferentialOrdergydF4y2Ba.的gydF4y2BareduceDifferentialOrdergydF4y2Ba函数用新的变量代替导数,例如gydF4y2BaDxt (t)gydF4y2Ba和gydF4y2BaDyt (t)gydF4y2Ba.表达式的右边gydF4y2Ba命令gydF4y2Ba是gydF4y2Ba0gydF4y2Ba.gydF4y2Ba
(方程式,var) = reduceDifferentialOrder(方程式,var)gydF4y2Ba
命令=gydF4y2Ba
var =gydF4y2Ba
步骤3。用gydF4y2BareduceDAEToODEgydF4y2Ba
减小所描述的DAEs的微分指数gydF4y2Ba命令gydF4y2Ba和gydF4y2BavargydF4y2Ba,使用gydF4y2BareduceDAEToODEgydF4y2Ba.为了减少索引,gydF4y2BareduceDAEToODEgydF4y2Ba为系统添加新的变量和方程。gydF4y2BareduceDAEToODEgydF4y2Ba也返回约束,这些约束是帮助查找初值的条件,以确保生成的ode与初始dae相等。gydF4y2Ba
(常微分方程、约束)= reduceDAEToODE(方程式,var)gydF4y2Ba
常微分方程=gydF4y2Ba
约束=gydF4y2Ba
步骤4。ode15s和ode23t的函数句柄gydF4y2Ba
从的输出gydF4y2BareduceDAEToODEgydF4y2Ba,你有一个向量的方程gydF4y2Ba常微分方程gydF4y2Ba一个变量向量gydF4y2BavargydF4y2Ba.使用gydF4y2Baode15sgydF4y2Ba或gydF4y2Baode23tgydF4y2Ba,需要两个函数句柄:一个表示ODE系统的质量矩阵,另一个表示包含质量矩阵方程右侧的向量。这些函数句柄是ODE系统的等效质量矩阵表示gydF4y2Ba米gydF4y2Ba(gydF4y2BatgydF4y2Ba,gydF4y2BaygydF4y2Ba(gydF4y2BatgydF4y2Ba))gydF4y2BaygydF4y2Ba”(gydF4y2BatgydF4y2Ba)=gydF4y2BafgydF4y2Ba(gydF4y2BatgydF4y2Ba,gydF4y2BaygydF4y2Ba(gydF4y2BatgydF4y2Ba)).gydF4y2Ba
使用。找到这些函数句柄gydF4y2BamassMatrixFormgydF4y2Ba来得到质量矩阵gydF4y2BamassMgydF4y2Ba(gydF4y2Ba米gydF4y2Ba在等式中)和右边gydF4y2BafgydF4y2Ba.gydF4y2Ba
[massM f] = massMatrixForm(常微分方程一样,var)gydF4y2Ba
massM =gydF4y2Ba
f =gydF4y2Ba
的方程gydF4y2Ba常微分方程gydF4y2Ba可以包含没有在变量向量中指定的符号参数gydF4y2BavargydF4y2Ba.使用gydF4y2BasetdiffgydF4y2Ba输出gydF4y2BasymvargydF4y2Ba从gydF4y2Ba常微分方程gydF4y2Ba和gydF4y2BavargydF4y2Ba.gydF4y2Ba
豆荚= symvar(常微分方程);pvars = symvar (var);extraParams = setdiff(pode, pars)gydF4y2Ba
extraParams =gydF4y2Ba
你需要指定的额外参数是质量gydF4y2Ba米gydF4y2Ba,半径gydF4y2BargydF4y2Ba,和引力常数gydF4y2BaggydF4y2Ba.gydF4y2Ba
转换gydF4y2BamassMgydF4y2Ba和gydF4y2BafgydF4y2Ba使用gydF4y2BaodeFunctiongydF4y2Ba.指定额外的符号参数作为附加的输入gydF4y2BaodeFunctiongydF4y2Ba.gydF4y2Ba
mssm = odeFunction(mssm, vars, m, r, g);f = odeFunction(f, vars, m, r, g);gydF4y2Ba
工作流的其余部分纯粹是数字。设置参数值并替换参数值gydF4y2Ba个标志性gydF4y2Ba和gydF4y2Ba约束gydF4y2Ba.gydF4y2Ba
m = 1;r = 1;g = 9.81;ODEsNumeric =潜艇(常微分方程);constraintsNumeric =潜艇(约束);gydF4y2Ba
创建适合于输入的函数句柄gydF4y2Baode15sgydF4y2Ba或gydF4y2Baode23sgydF4y2Ba.gydF4y2Ba
M = @(t,Y) massM(t,Y, M,r,g);F = @(t,Y) F (t,Y,m,r,g);gydF4y2Ba
第5步。初始条件为gydF4y2Baode15sgydF4y2Ba和gydF4y2Baode23tgydF4y2Ba
求解器要求函数句柄中所有变量的初始值。利用MATLAB®找到满足方程的初值gydF4y2BadecicgydF4y2Ba函数。的gydF4y2BadecicgydF4y2Ba接受对初始条件的猜测(可能不满足方程),并尝试使用这些猜测找到满意的初始条件。gydF4y2BadecicgydF4y2Ba可能会失败,在这种情况下,您必须手动为您的问题提供一致的初始值。gydF4y2Ba
首先,检入变量gydF4y2BavargydF4y2Ba.gydF4y2Ba
vargydF4y2Ba
var =gydF4y2Ba
在这里,gydF4y2BaDxt (t)gydF4y2Ba的一阶导数是gydF4y2Bax (t)gydF4y2Ba,等等。a中有5个变量gydF4y2Ba5gydF4y2Ba——- - - - - -gydF4y2Ba1gydF4y2Ba向量。因此,对变量及其导数的初值的猜测也必须是gydF4y2Ba5gydF4y2Ba——- - - - - -gydF4y2Ba1gydF4y2Ba向量。gydF4y2Ba
假设摆的初始角位移为30°或gydF4y2Baπ/ 6gydF4y2Ba,坐标的原点是摆的悬挂点。假设我们用的是半径gydF4y2BargydF4y2Ba的gydF4y2Ba1gydF4y2Ba,初始水平位置gydF4y2Bax (t)gydF4y2Ba是gydF4y2Bar * sin(π/ 6)gydF4y2Ba.初始垂直位置gydF4y2Bay (t)gydF4y2Ba是gydF4y2Ba- r * cos(π/ 6)gydF4y2Ba.指定向量中变量的初始值gydF4y2Bay0gydF4y2Ba.gydF4y2Ba
将其余变量及其导数的初始值任意设置为gydF4y2Ba0gydF4y2Ba.这些都不是很好的猜测。然而,它们足以解决这个问题。在你的问题中,如果gydF4y2BadecicgydF4y2Ba错误,然后提供更好的猜测并参考gydF4y2BadecicgydF4y2Ba页面。gydF4y2Ba
y0 = [r * sin(π/ 6);- r * cos(π/ 6);0;0;0);yp0est = 0(5、1);gydF4y2Ba
创建包含质量矩阵的选项集gydF4y2Ba米gydF4y2Ba,并指定数值搜索的数值公差。gydF4y2Ba
选择= odeset (gydF4y2Ba“质量”gydF4y2Ba米,gydF4y2Ba“RelTol”gydF4y2Ba10.0 ^ (7),gydF4y2Ba“AbsTol”gydF4y2Ba10.0 ^ (7));gydF4y2Ba
利用微分方程求出与ode系统和代数约束一致的初值gydF4y2BadecicgydF4y2Ba.的参数gydF4y2Ba[1, 0, 0, 0, 1]gydF4y2Ba在这个函数调用修复了第一个和最后一个元素gydF4y2Bay0gydF4y2Ba,所以gydF4y2BadecicgydF4y2Ba在数值搜索过程中不会改变它们。在这里,这种修复是必要的gydF4y2BadecicgydF4y2Ba找到满意的初始条件。gydF4y2Ba
[y0, yp0] = decic(ODEsNumeric, vars, constraintsNumeric, 0,)gydF4y2Ba...gydF4y2BaY0est, [1,0,0,0,1], yp0est, opt)gydF4y2Ba
y0 =gydF4y2Ba5×1gydF4y2Ba0.5000 -0.8660 -8.4957 00gydF4y2Ba
yp0 =gydF4y2Ba5×1gydF4y2Ba0 0 0 -4.2479 -2.4525gydF4y2Ba
现在创建一个包含质量矩阵的选项集gydF4y2Ba米gydF4y2Ba系统和向量的关系gydF4y2Bayp0gydF4y2Ba导数的初始值一致。您将在解决系统时使用此选项集。gydF4y2Ba
选择= odeset(选择,gydF4y2Ba“InitialSlope”gydF4y2Ba, yp0);gydF4y2Ba
步骤6。用gydF4y2Baode15sgydF4y2Ba或gydF4y2Baode23tgydF4y2Ba
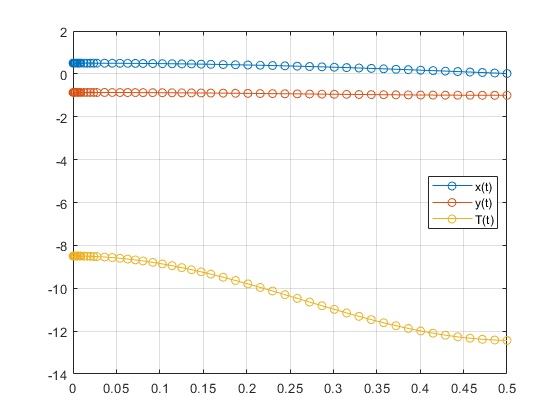
解决系统在时间跨度内的积分问题gydF4y2Ba0gydF4y2Ba≤gydF4y2BatgydF4y2Ba≤gydF4y2Ba0.5gydF4y2Ba.将网格线和图例添加到情节中。使用gydF4y2Baode23sgydF4y2Ba通过替换gydF4y2Baode15sgydF4y2Ba与gydF4y2Baode23sgydF4y2Ba.gydF4y2Ba
[tSol,ySol] = ode15s(F, [0,0.5], y0, opt);情节(tSol ySol (: 1: origVars),gydF4y2Ba“o”gydF4y2Ba)gydF4y2Ba为gydF4y2Bak = 1:origVars S{k} = char(vars(k));gydF4y2Ba结束gydF4y2Ba传奇(年代,gydF4y2Ba“位置”gydF4y2Ba,gydF4y2Ba“最佳”gydF4y2Ba网格)gydF4y2Ba在gydF4y2Ba
针对不同的参数值,通过设置新值并重新生成函数句柄和初始条件来求解系统。gydF4y2Ba
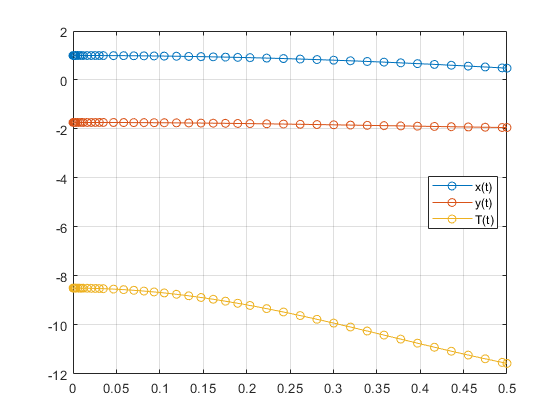
集gydF4y2BargydF4y2Ba来gydF4y2Ba2gydF4y2Ba然后重复这些步骤。gydF4y2Ba
r = 2;ODEsNumeric =潜艇(常微分方程);constraintsNumeric =潜艇(约束);M = @(t,Y) massM(t,Y, M,r,g);F = @(t,Y) F (t,Y,m,r,g);y0 = [r * sin(π/ 6);- r * cos(π/ 6);0;0;0); opt = odeset(“质量”gydF4y2Ba米,gydF4y2Ba“RelTol”gydF4y2Ba10.0 ^ (7),gydF4y2Ba“AbsTol”gydF4y2Ba10.0 ^ (7));[y0, yp0] = decic(ODEsNumeric, vars, constraintsNumeric, 0,)gydF4y2Ba...gydF4y2BaY0est, [1,0,0,0,1], yp0est, opt);选择= odeset(选择,gydF4y2Ba“InitialSlope”gydF4y2Ba, yp0);gydF4y2Ba
解决系统的新参数值。gydF4y2Ba
[tSol,ySol] = ode15s(F, [0,0.5], y0, opt);情节(tSol ySol (: 1: origVars),gydF4y2Ba“o”gydF4y2Ba)gydF4y2Ba为gydF4y2Bak = 1:origVars S{k} = char(vars(k));gydF4y2Ba结束gydF4y2Ba传奇(年代,gydF4y2Ba“位置”gydF4y2Ba,gydF4y2Ba“最佳”gydF4y2Ba网格)gydF4y2Ba在gydF4y2Ba
另请参阅gydF4y2Ba
daeFunctiongydF4y2Ba|gydF4y2BadecicgydF4y2Ba|gydF4y2BafindDecoupledBlocksgydF4y2Ba|gydF4y2BaincidenceMatrixgydF4y2Ba|gydF4y2BaisLowIndexDAEgydF4y2Ba|gydF4y2BamassMatrixFormgydF4y2Ba|gydF4y2BaodeFunctiongydF4y2Ba|gydF4y2BareduceDAEIndexgydF4y2Ba|gydF4y2BareduceDAEToODEgydF4y2Ba|gydF4y2BareduceDifferentialOrdergydF4y2Ba|gydF4y2BareduceRedundanciesgydF4y2Ba
相关的话题gydF4y2Ba
选择网站gydF4y2Ba
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:gydF4y2Ba.gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba你也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba