文档帮助中心文档
从无人机场景平台获取转换
无人机工具箱/无人机场景和传感器建模
这个块输出一个4乘4的变换矩阵,在UAV场景中将源帧中的点映射到目标帧。
要使用此块,请确保无人机场景配置块在模型中。
属性中指定的示例时间无人机场景配置块。
无人机场景块不支持:金宝app
代码生成
模型参考
的多个实例无人机场景配置块
加速模式
此外,在闭环模拟中使用这些块时,执行顺序也很重要。的无人机场景配置块必须首先执行。的无人机场景动态写块必须在无人机场景动态读取,无人机场景激光雷达,无人机的场景范围块。
全部展开
变换
指定为4 × 4变换矩阵的输出变换。
源帧
“ENU表示”
NED的
使用选择从模型中加载的UAV场景中选择全局坐标源帧。选择东北至东北('NED的),或东北北北(“ENU表示”).
目标框架
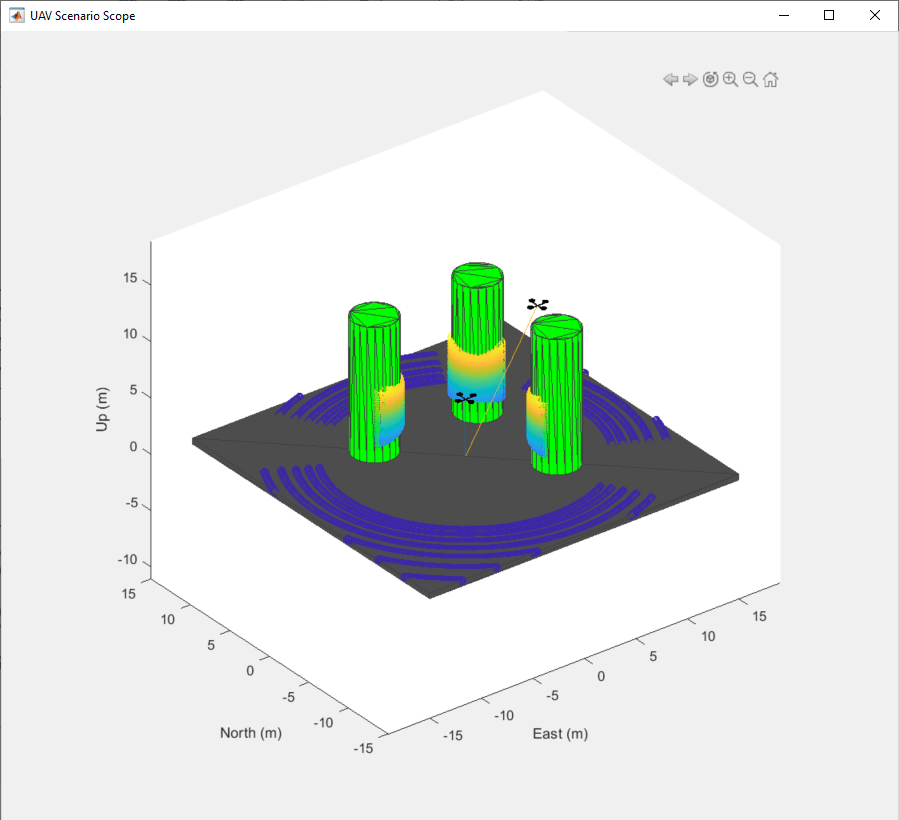
使用无人机场景模块在Simulink®中模拟一个场景。金宝app
getTransform
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系
得到审判现在