场景模拟
利用真实的无人机场景和传感器模型进行仿真是测试无人机算法的关键部分。无人机的工具箱提供两个模拟环境,在其中测试这些算法。两种环境都有各自的用途,其中一种环境不能替代另一种环境。
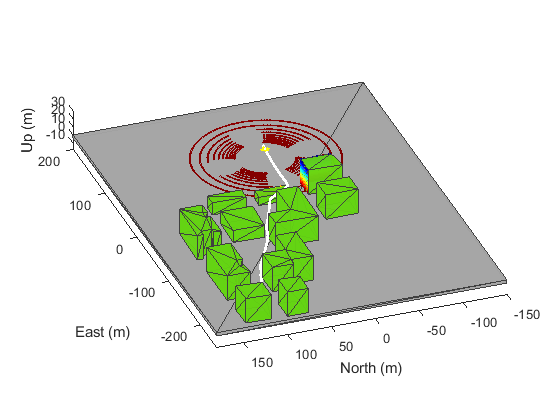
在长方体模拟环境在场景中,车辆和其他平台被表示为简单的盒子形状,或者在激光雷达应用中,被表示为多边形网格。使用此环境可以快速编写场景或生成传感器数据。测试控制器,跟踪算法,传感器融合算法在MATLAB中®和仿真软金宝app件®.要开始编写场景,请使用
uavScenario对象。在虚幻引擎®模拟环境,场景渲染使用来自Epic Games的虚幻引擎®.使用这个环境来使用更逼真的图形来可视化场景;生成高保真雷达、相机和激光雷达传感器数据;以及测试回路感知系统。这个环境可以在Simulink中使用,并且可以在Windows上运金宝app行®只有。想要了解更多,请看无人机虚拟引擎仿真.
功能
块
| 无人机指导模型 | 无人机降阶模型 |
| 无人机的动画 | 动画无人机飞行路径使用平移和旋转 |
| 路经理 | 计算并执行无人机自主任务 |
| 全球定位系统(GPS) | 模拟带有噪声的GPS传感器读数 |
| INS | 模拟INS传感器 |
| 仿真3D无人机车辆 | 放置无人机车辆在三维可视化 |
| 模拟3D场景配置 | 三维仿真环境的场景配置 |
| 模拟3 d相机 | 三维仿真环境中带镜头的摄像机传感器模型 |
| 模拟3 d激光雷达 | 三维仿真环境下的激光雷达传感器模型 |
| 模拟3D鱼眼摄像机 | 三维仿真环境中的鱼眼摄像机传感器模型 |
| 视频发送 | 发送视频流到远程硬件 |
| 无人机场景配置 | 配置和模拟无人机场景 |
| 无人机场景得到变换 | 从无人机场景平台获取转换 |
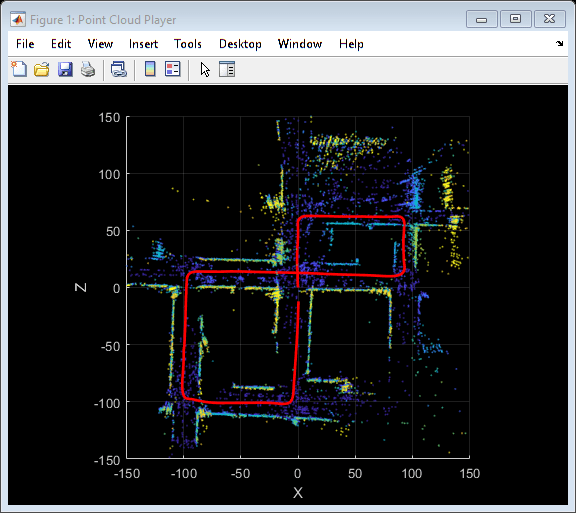
| 无人机场景激光雷达 | 模拟场景中基于网格的激光雷达测量 |
| 无人机场景动态读取 | 从无人机场景模拟中读取平台和传感器的运动 |
| 无人机场景动态写 | 更新无人机场景仿真中的平台运动 |
| 无人机的场景范围 | 可视化无人机场景和激光雷达点云 |
场景和车辆尺寸
主题
模拟基础知识
学习如何在Simulink中使用无人机算法,并在虚拟环境中使用史诗游戏的虚幻引擎可视化其性能。金宝app
在虚幻引擎环境中进行模拟时,请牢记这些软件要求、最低硬件要求和限制。
了解Simulink和虚幻引擎之间的联合仿真框架,以及块执行顺序如何影响仿真。金宝app
在虚幻引擎环境中模拟时,了解世界和无人机坐标系统。
模拟传感器
创建一个传感器适配器imuSensor从导航工具箱™中收集模拟无人机飞行场景的读数。
该雷达传感器使无人机能够检测空域中的其他车辆,从而无人机可以预测其他车辆的运动,并做出决策,确保与其他车辆的间隙。
决定在使用虚幻引擎进行3D模拟时使用哪个摄像机或激光雷达传感器。
无人机工具箱™在使用Epic Games®的虚幻引擎®的模拟环境中提供可视化传感器块。
这个示例演示了如何在仿真环境中可视化从摄像机传感器捕获的深度和语义分割数据。
流相机,深度和语义分割数据从虚幻引擎到NVIDIA Jetson
这个示例演示了如何将模拟的摄像头、深度和语义分割标签数据从虚幻引擎®场景流到NVIDIA®Jetson硬件视频发送在仿真软件®。金宝app
现场定制
为无人机飞行应用定制虚幻引擎场景。
将标签应用于场景中的对象,以便从摄像机传感器获取语义分割数据。
创建自定义车辆网格仿真3D无人机车辆块。
特色的例子

你也可以从以下列表中选择一个网站: