主要内容
数据处理和可视化
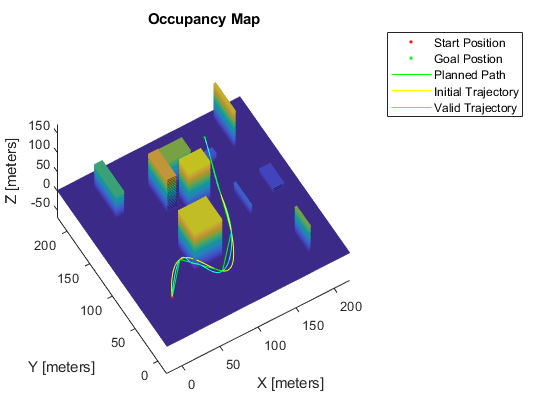
转换坐标系,生成轨迹,可视化点云和转换
使用数据处理和可视化函数作为实用函数,在不同的坐标系统之间转换,从路径点生成轨迹,或可视化数据,如点云或无人机姿态。
功能
块
| 坐标变换的转换 | 转换为指定的坐标转换表示形式 |
主题
根据您的数据选择一个坐标转换函数。
特色的例子
你也可以从以下列表中选择一个网站:
使用数据处理和可视化函数作为实用函数,在不同的坐标系统之间转换,从路径点生成轨迹,或可视化数据,如点云或无人机姿态。
| 坐标变换的转换 | 转换为指定的坐标转换表示形式 |
根据您的数据选择一个坐标转换函数。
你也可以从以下列表中选择一个网站: