Get Started withUAV Toolbox
UAV Toolboxprovides tools and reference applications for designing, simulating, testing, and deploying unmanned aerial vehicle (UAV) and drone applications. You can design autonomous flight algorithms, UAV missions, and flight controllers. The Flight Log Analyzer app lets you interactively analyze 3D flight paths, telemetry information, and sensor readings from common flight log formats.
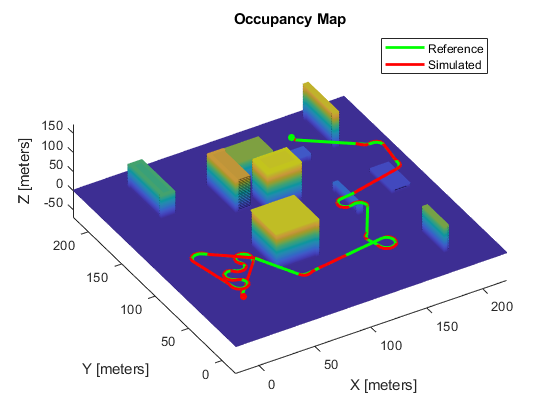
For desktop simulation and hardware-in-the-loop (HIL) testing of autonomous flight algorithms and flight controllers, you can generate and simulate UAV scenarios. You can simulate camera, lidar, IMU, and GPS sensor outputs in a photorealistic 3D environment or in a 2.5D simulation environment.
UAV Toolboxprovides reference application examples for common UAV usages, such as autonomous drone package delivery with multirotor UAV. The toolbox supports C/C++ code generation for rapid prototyping, HIL testing, and standalone deployment to hardware such as the Pixhawk®Autopilot.
Tutorials
- Visualize and Playback MAVLink Flight Log
This example shows how to load a telemetry log (TLOG) containing MAVLink packets into MATLAB®.
- Visualize Custom Flight Log
配置
flightLogSignalMappingobject to visualize data from a custom flight log. - UAV Scenario Tutorial
Create a scenario to simulate unmanned aerial vehicle (UAV) flights between a set of buildings.
- Approximate High-Fidelity UAV model with UAV Guidance Model block
Simulation models often need different levels of fidelity during different development stages.
- Transition from Low to High-Fidelity UAV Models in Three Stages
This example shows how to continuously evolve your UAV plant model to keep in sync with the latest information available.
Featured Examples

You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)