主要内容
计划和控制
指导模型和导航、轨迹和航点
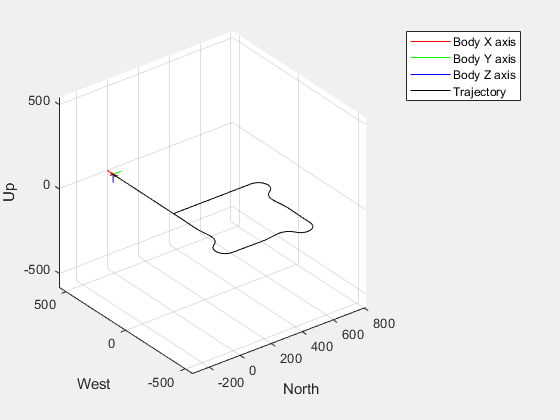
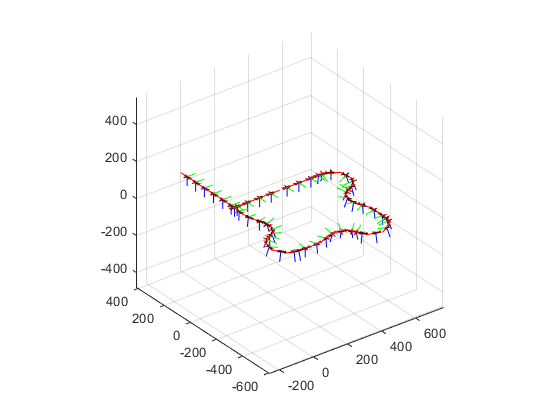
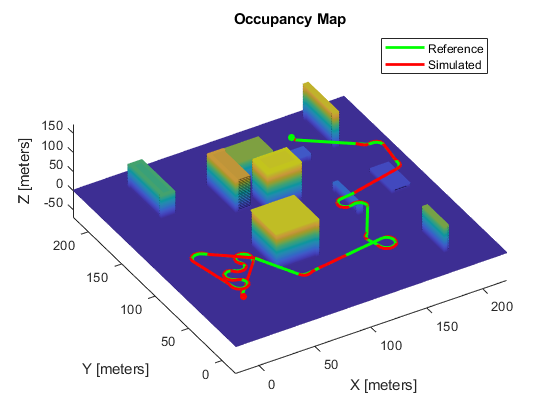
计划和执行使用指导运动模型固定翼无人机飞行和multirotor无人机。使用路标和trajectory-following算法飞预定义的任务。例如使用一个RRT路径规划计划和模拟飞行在城市环境中,明白了运动规划与RRT固定翼无人机。
计划和执行使用指导运动模型固定翼无人机飞行和multirotor无人机。使用路标和trajectory-following算法飞预定义的任务。例如使用一个RRT路径规划计划和模拟飞行在城市环境中,明白了运动规划与RRT固定翼无人机。