状态
UAV州矢量
描述
议定书=州(uavguidancemodel.)衍生物功能或在模拟UAV时使用ODE45.。
例子
模拟多电机控制命令
此示例显示了如何使用Multorotor.指导模型以指示命令输入模拟UAV状态的变化。
创建多电机引导模型。
型号= Multorot;
创建状态结构。在世界坐标中指定位置。
s =状态(模型);s(1:3)= [3; 2; 1];
指定控件命令,你,指定多电机的卷和推力。
U =控制(模型);U.roll = PI / 12;U.Thrust = 1;
创建一个没有风的默认环境。
e =环境(模型);
给定当前状态,控制命令和环境的状态的时间导数。
sdot =衍生物(模型,s,u,e);
模拟UAV状态使用ODE45.一体化。这y字段将固定翼UAV状态输出为13-逐个N.矩阵。
simout = ode45(@(〜,x)衍生物(型号,x,u,e),[0 3],s);大小(Simout.y)
ans =.1×213 3536.
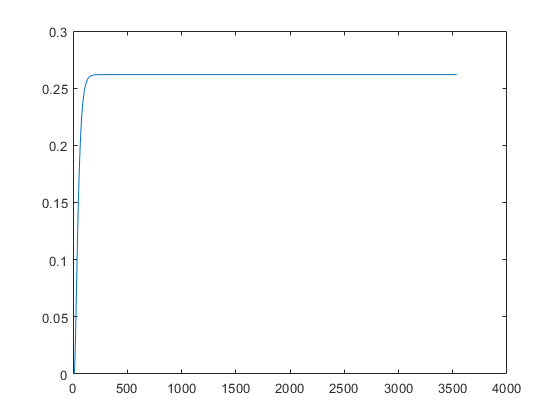
基于仿真输出绘制卷角的变化。滚动角度(x欧拉角)是第9行simout.y.输出。
绘图(Simout.y(9,:))
绘制Y和Z位置的变化。使用指定的推力和滚动角度,多电孔应飞过并失去一些高度。Z的正值预计为正Z下降。
图绘图(Simout.y(2,:));抓住在绘图(SIMOUT.Y(3,:));传奇('y-position'那'z位置') 抓住离开

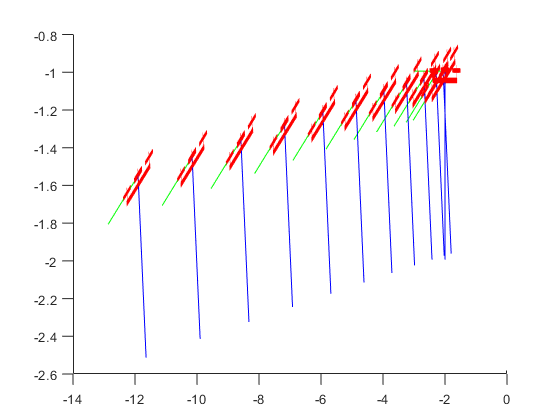
您还可以使用多电泳轨迹绘制plottransforms.。从模拟状态创建平移和旋转向量。下拍(每300个元素)并转换sim元素,并将欧拉角转换为四元数。指定网格作为multirotor.stl.文件和正Z方向“下”。显示的视图显示了在Y方向和丢失高度中翻译的UAV。
翻译= simout.y(1:3,1:300:结束)';%XYZ位置旋转= Eul2quat(Simout.y(7:9,1:300:END)');%zyx eulerplottransforms(翻译,旋转,......'meshfilepath'那'multirotor.stl'那'inertialzdirection'那“下”)查看([90.00 -0.60])
模拟固定翼控制命令
此示例显示了如何使用固定翼翼指导模型以指示命令输入模拟UAV状态的变化。
创建固定翼指导模型。
型号=固定行;
通过修改结构来设置车辆的空气速度状态功能。
s =状态(模型);s(4)= 5;%5米/秒
指定控件命令,你,这保持了空气速度并给出了卷角PI / 12.。
U =控制(模型);U.rollangle = PI / 12;U.Airspeed = 5;
创建一个没有风的默认环境。
e =环境(模型);
给定当前状态,控制命令和环境的状态的时间导数。
sdot =衍生物(模型,s,u,e);
模拟UAV状态使用ODE45.一体化。这y字段基于此模拟输出固定翼UV状态。
simout = ode45(@(〜,x)衍生物(型号,x,u,e),[0 50],s);大小(Simout.y)
ans =.1×28 904.
基于仿真输出绘制卷角的变化。滚动角是第7行simout.y.输出。
情节(SIMOUT.Y(7,:))

您还可以使用固定翼轨迹绘制plottransforms.。从模拟状态创建平移和旋转向量。下拍(每30个元素)并转换sim元素,并将欧拉角转换为四元数。指定网格作为matedwing.stl.文件和正Z方向“下”。显示的视图显示了UAV基于恒定滚动角度进行恒定转弯。
Downsample = 1:30:尺寸(SIMOUT.Y,2);翻译= simout.y(1:3,下拍)';%XYZ位置旋转= eul2quat([simout.y(5,downsample)',simout.y(6,downsample)',simout.y(7,downsample)']);%zyx eulerplottransforms(翻译,旋转,......'meshfilepath'那'matedwing.stl'那'inertialzdirection'那“下”) 抓住在plot3(simout.y(1,:), - simout.y(2,:),simout.y(3,:),'--b')% 完整路径XLIM([ - 10.0 10.0])ylim([ - 20.0 5.0])zlim([ - 0.5 4.00])视图([ - 45 90])保持离开

输入参数
输出参数
扩展能力
也可以看看
功能
对象
块
您还可以从以下列表中选择一个网站: