固定翼翼gydF4y2Ba
固定翼无人机的指导模型gydF4y2Ba
描述gydF4y2Ba
一个gydF4y2Ba固定翼翼gydF4y2Ba对象表示了一种无人机(UAV)的降阶制导模型。该模型近似于一个由自动驾驶仪控制器和一个固定翼运动学模型组成的三维运动闭环系统的行为。gydF4y2Ba
对于Multiorot Uavs,请参阅gydF4y2BaMultorotor.gydF4y2Ba。gydF4y2Ba
创建gydF4y2Ba
模型= fixedwinggydF4y2Ba创建一个固定翼运动模型gydF4y2Ba双倍的gydF4y2Ba引导模型的输入,输出和配置参数的精度值。gydF4y2Ba
Model =固定行(数据类型)gydF4y2Ba指定数据类型精度(gydF4y2Ba数据类型gydF4y2Ba属性)用于导航模型的输入、输出和配置参数。gydF4y2Ba
属性gydF4y2Ba
对象的功能gydF4y2Ba
控制gydF4y2Ba |
无人机控制命令gydF4y2Ba |
导数gydF4y2Ba |
无人机状态的时间导数gydF4y2Ba |
环境gydF4y2Ba |
无人机的环境输入gydF4y2Ba |
状态gydF4y2Ba |
无人机状态向量gydF4y2Ba |
例子gydF4y2Ba
模拟固定翼控制命令gydF4y2Ba
此示例显示了如何使用gydF4y2Ba固定翼翼gydF4y2Ba制导模型,以模拟无人机由于指令输入而产生的状态变化。gydF4y2Ba
创建固定翼制导模型。gydF4y2Ba
模型= fixedwing;gydF4y2Ba
通过修改结构来设置车辆的空气速度gydF4y2Ba状态gydF4y2Ba函数。gydF4y2Ba
s =国家(模型);(4) = 5;gydF4y2Ba%5米/秒gydF4y2Ba
指定控件命令,gydF4y2BaugydF4y2Ba,这保持了空气速度并给出了卷角gydF4y2BaPI / 12.gydF4y2Ba。gydF4y2Ba
u =控制(模型);u.RollAngle =π/ 12;u.AirSpeed = 5;gydF4y2Ba
创建一个没有风的默认环境。gydF4y2Ba
e =环境(模型);gydF4y2Ba
根据当前状态、控制命令和环境,计算状态的时间导数。gydF4y2Ba
sdot =导数(模型、s u, e);gydF4y2Ba
模拟UAV状态使用gydF4y2BaODE45.gydF4y2Ba一体化。这gydF4y2BaygydF4y2Ba在此仿真的基础上输出固定翼无人机的状态。gydF4y2Ba
simOut =数值(@ (~,x)导数(模型、x u, e), 50 [0]);大小(simOut.y)gydF4y2Ba
ans =.gydF4y2Ba1×2gydF4y2Ba8 904.gydF4y2Ba
根据仿真输出绘制滚转角的变化曲线。横摇角是第7行gydF4y2BasimOut.ygydF4y2Ba输出。gydF4y2Ba
情节(SIMOUT.Y(7,:))gydF4y2Ba

你也可以用gydF4y2Baplottransforms.gydF4y2Ba。从模拟状态创建平移和旋转向量。下采样(每30个元素)然后转置gydF4y2BasimOutgydF4y2Ba元素,并将欧拉角转换为四元数。指定网格作为gydF4y2Bamatedwing.stl.gydF4y2Ba文件和正Z方向gydF4y2Ba“下”gydF4y2Ba。显示的视图显示了UAV基于恒定滚动角度进行恒定转弯。gydF4y2Ba
Downsample = 1:30:尺寸(SIMOUT.Y,2);翻译= simout.y(1:3,下拍)';gydF4y2Ba% xyz-positiongydF4y2Ba旋转= eul2quat([simout.y(5,downsample)',simout.y(6,downsample)',simout.y(7,downsample)']);gydF4y2Ba% ZYX股票欧拉gydF4y2Baplottransforms(翻译,旋转,gydF4y2Ba…gydF4y2Ba'meshfilepath'gydF4y2Ba,gydF4y2Ba“fixedwing.stl”gydF4y2Ba,gydF4y2Ba“InertialZDirection”gydF4y2Ba,gydF4y2Ba“下”gydF4y2Ba) 抓住gydF4y2Ba在gydF4y2Ba: plot3 (simOut.y (1), -simOut.y (2:), simOut.y (3:)gydF4y2Ba“——b”gydF4y2Ba)gydF4y2Ba%完整路径gydF4y2BaXLIM([ - 10.0 10.0])ylim([ - 20.0 5.0])zlim([ - 0.5 4.00])视图([ - 45 90])保持gydF4y2Ba离开gydF4y2Ba

更多关于gydF4y2Ba
UAV固定翼引导模型方程式gydF4y2Ba
对于固定翼无人机,采用下式定义无人机的制导模型。使用gydF4y2Ba导数gydF4y2Ba使用这些管理方程来计算UAV状态的时间衍生的功能。使用该输入指定输入gydF4y2Ba状态gydF4y2Ba,gydF4y2Ba控制gydF4y2Ba, 和gydF4y2Ba环境gydF4y2Ba功能。gydF4y2Ba
无人机在地框中的位置为[gydF4y2BaxgydF4y2BaegydF4y2Ba,gydF4y2BaygydF4y2BaegydF4y2Ba,gydF4y2BahgydF4y2Ba]以航向角、航迹角、滚转角为方向,[gydF4y2BaχgydF4y2Ba,gydF4y2Baγ.gydF4y2Ba,gydF4y2Baφ.gydF4y2Ba在弧度。gydF4y2Ba
该模型假设无人机在协调转弯条件下飞行,且无侧滑。自动驾驶仪控制空速、高度和滚转角度。相应的运动方程为:gydF4y2Ba
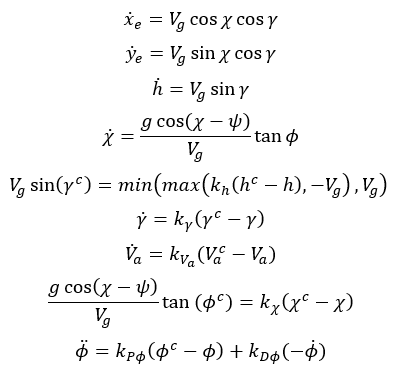
VgydF4y2Ba一个gydF4y2Ba和gydF4y2BaVgydF4y2BaggydF4y2Ba表示无人机的空中、地面速度。gydF4y2Ba
风速被指定为[gydF4y2BaVgydF4y2BawgydF4y2BangydF4y2Ba,gydF4y2BaVgydF4y2BawgydF4y2BaegydF4y2Ba,gydF4y2BaVgydF4y2BawgydF4y2BadgydF4y2Ba向北,向东,向南。要为这些输入生成结构,请使用gydF4y2Ba环境gydF4y2Ba函数。gydF4y2Ba
kgydF4y2Ba*gydF4y2Ba是控制器的收益。要指定这些增益,请使用gydF4y2Ba配置gydF4y2Ba财产的财产gydF4y2Ba固定翼翼gydF4y2Ba目的。gydF4y2Ba
从这些管理方程式,该模型提供以下变量:gydF4y2Ba![]()
这些变量与输出匹配gydF4y2Ba状态gydF4y2Ba函数。gydF4y2Ba
参考gydF4y2Ba
[1] Randal W.胡子和蒂莫西W. Mclain。“第9章”gydF4y2Ba小无人驾驶飞机理论与实践gydF4y2Ba,新泽西:普林斯顿大学出版社,2012年。gydF4y2Ba
扩展功能gydF4y2Ba
另请参阅gydF4y2Ba
功能gydF4y2Ba
控制gydF4y2Ba|gydF4y2Ba导数gydF4y2Ba|gydF4y2Ba环境gydF4y2Ba|gydF4y2BaODE45.gydF4y2Ba|gydF4y2Baplottransforms.gydF4y2Ba|gydF4y2Ba状态gydF4y2Ba
对象gydF4y2Ba
块gydF4y2Ba
- 无人机指导模型gydF4y2Ba|gydF4y2Ba航点追随者gydF4y2Ba
选择一个网站gydF4y2Ba
选择一个网站,在可用的地方获得翻译内容,并查看本地事件和优惠。根据您的位置,我们建议您选择:gydF4y2Ba。gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba您还可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- América拉丁gydF4y2Ba(Español)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德意志)gydF4y2Ba
- España.gydF4y2Ba(Español)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德意志)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 英国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本语gydF4y2Ba(日本语)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba