指导模型GyD.F4y2Ba
无人机的减少级模型GyD.F4y2Ba
- 图书馆:GyD.F4y2Ba
UAV工具箱/算法GyD.F4y2Ba
描述GyD.F4y2Ba
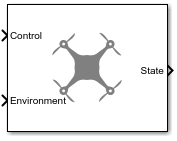
这GyD.F4y2Ba指导模型GyD.F4y2Ba块代表一个小型无人驾驶车辆(UAV)指导模型,可根据控制和环境输入估计无人机状态。该模型近似于由自动驾驶仪控制器和用于3-D运动的固定翼或多电脑运动学模型组成的闭环系统的行为。使用此块作为缩小订单引导模型,以模拟您的固定翼或多电流UAV。指定GyD.F4y2Bamodeltype.GyD.F4y2Ba选择您的UAV类型。使用GyD.F4y2Ba初始状态GyD.F4y2Ba选项卡根据模型类型指定UAV的初始状态。这GyD.F4y2Ba组态GyD.F4y2Ba标签定义了UAV的控制参数和物理参数。GyD.F4y2Ba
港口GyD.F4y2Ba
输入GyD.F4y2Ba
输出GyD.F4y2Ba
参数GyD.F4y2Ba
更多关于GyD.F4y2Ba
UAV固定翼引导模型方程式GyD.F4y2Ba
对于固定翼UAV,使用以下等式来定义UAV的引导模型。使用GyD.F4y2Ba衍生物GyD.F4y2Ba使用这些管理方程来计算UAV状态的时间衍生的功能。使用该输入指定输入GyD.F4y2Ba状态GyD.F4y2Ba那GyD.F4y2Ba控制GyD.F4y2Ba,和GyD.F4y2Ba环境GyD.F4y2Ba功能。GyD.F4y2Ba
地球框架中的无人机位置是[GyD.F4y2BaXGyD.F4y2BaE.GyD.F4y2Ba那GyD.F4y2BayGyD.F4y2BaE.GyD.F4y2Ba那GyD.F4y2BaHGyD.F4y2Ba]定向为标题角度,飞行路径角和滚角,[GyD.F4y2BaχGyD.F4y2Ba那GyD.F4y2Baγ.GyD.F4y2Ba那GyD.F4y2Baφ.GyD.F4y2Ba在弧度中。GyD.F4y2Ba
该模型假设UAV在协调条件下飞行,零侧滑动。自动驾驶仪控制空速,高度和滚动角度。相应的运动方程是:GyD.F4y2Ba
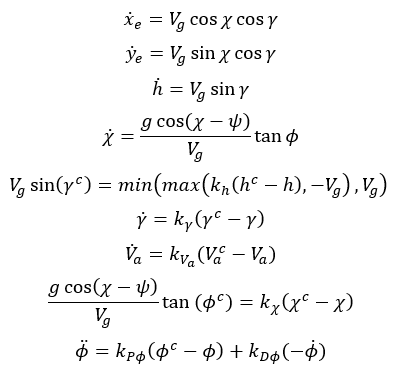
V.GyD.F4y2Ba一种GyD.F4y2Ba和GyD.F4y2BaV.GyD.F4y2BaGGyD.F4y2Ba表示UAV空气和地面速度。GyD.F4y2Ba
风速被指定为[GyD.F4y2BaV.GyD.F4y2BaW.GyD.F4y2BaNGyD.F4y2Ba那GyD.F4y2BaV.GyD.F4y2BaW.GyD.F4y2BaE.GyD.F4y2Ba那GyD.F4y2BaV.GyD.F4y2BaW.GyD.F4y2BaD.GyD.F4y2Ba]对于北,东方和下方的方向。要生成这些输入的结构,请使用GyD.F4y2Ba环境GyD.F4y2Ba功能。GyD.F4y2Ba
K.GyD.F4y2Ba*GyD.F4y2Ba控制器收益。要指定这些收益,请使用GyD.F4y2Ba组态GyD.F4y2Ba财产的财产GyD.F4y2Ba固定翼翼GyD.F4y2Ba目的。GyD.F4y2Ba
从这些管理方程式,该模型提供以下变量:GyD.F4y2Ba![]()
这些变量与输出匹配GyD.F4y2Ba状态GyD.F4y2Ba功能。GyD.F4y2Ba
UAV Multiotor Guidance模型方程GyD.F4y2Ba
对于多调节器,以下等式用于定义UAV的引导模型。要计算使用这些管理方程式的UAV状态的时间导数,请使用GyD.F4y2Ba衍生物GyD.F4y2Ba功能。使用输入输入输入GyD.F4y2Ba状态GyD.F4y2Ba那GyD.F4y2Ba控制GyD.F4y2Ba,和GyD.F4y2Ba环境GyD.F4y2Ba。GyD.F4y2Ba
地球框架中的无人机位置是[GyD.F4y2BaXGyD.F4y2BaE.GyD.F4y2Ba那GyD.F4y2BayGyD.F4y2BaE.GyD.F4y2Ba那GyD.F4y2BaZ.GyD.F4y2BaE.GyD.F4y2Ba]以方向为Zyx欧拉角,[GyD.F4y2BaψGyD.F4y2Ba那GyD.F4y2Baθ.GyD.F4y2Ba那GyD.F4y2Baφ.GyD.F4y2Ba在弧度中。角速度是[GyD.F4y2BaP.GyD.F4y2Ba那GyD.F4y2Ba问:GyD.F4y2Ba那GyD.F4y2BaR.GyD.F4y2Ba在每秒弧度。GyD.F4y2Ba
UAV Body Frame使用坐标作为[GyD.F4y2BaXGyD.F4y2BaB.GyD.F4y2Ba那GyD.F4y2BayGyD.F4y2BaB.GyD.F4y2Ba那GyD.F4y2BaZ.GyD.F4y2BaB.GyD.F4y2Ba]。GyD.F4y2Ba
从世界旋转到身体框架的旋转矩阵是:GyD.F4y2Ba
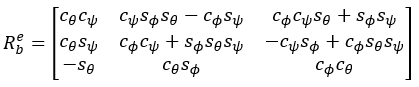
cos(GyD.F4y2BaXGyD.F4y2Ba)和罪恶(GyD.F4y2BaXGyD.F4y2Ba)缩写为GyD.F4y2BaCGyD.F4y2BaXGyD.F4y2Ba和GyD.F4y2BaS.GyD.F4y2BaXGyD.F4y2Ba。GyD.F4y2Ba
在地球坐标中的UAV质量群体的加速度受到:GyD.F4y2Ba

mGyD.F4y2Ba是无人机的大米,GyD.F4y2BaGGyD.F4y2Ba是重力,和GyD.F4y2BaFGyD.F4y2Ba推力GyD.F4y2Ba是由螺旋桨沿着 - 的螺旋桨产生的总力 -GyD.F4y2BaZ.GyD.F4y2BaB.GyD.F4y2Ba轴(在水平姿势上向上点)。GyD.F4y2Ba
闭环辊间距姿态控制器由两个旋转角度的2个独立的PD控制器的行为近似,以及用于横摆率的2个独立的P控制器和推力。角速度,角度加速和推力受:GyD.F4y2Ba
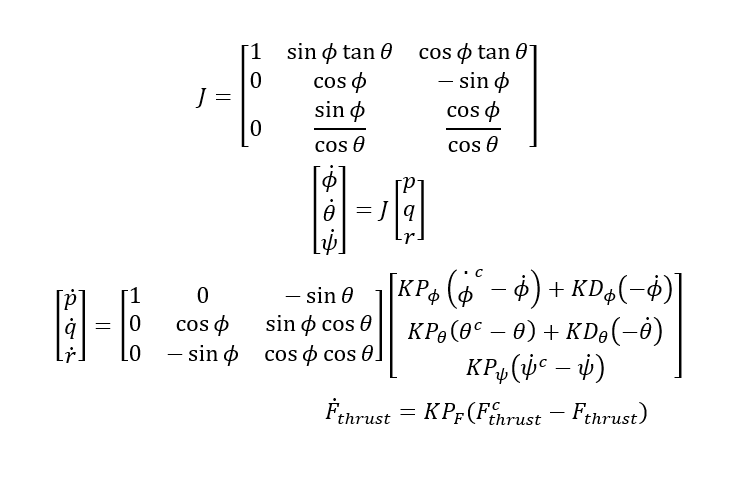
该模型假定自动驾驶仪采用命令滚动,间距,横摆率,[GyD.F4y2BaψGyD.F4y2BaCGyD.F4y2Ba那GyD.F4y2Baθ.GyD.F4y2BaCGyD.F4y2Ba那GyD.F4y2Baφ.GyD.F4y2Ba。CGyD.F4y2Ba]并指挥的总推力,GyD.F4y2BaFGyD.F4y2BaCGyD.F4y2Ba推力GyD.F4y2Ba。指定这些输入的结构是生成的GyD.F4y2Ba控制GyD.F4y2Ba。GyD.F4y2Ba
控制输入的P和D增益指定为GyD.F4y2Bakp.GyD.F4y2Baα.GyD.F4y2Ba和GyD.F4y2Bakd.GyD.F4y2Baα.GyD.F4y2Ba, 在哪里GyD.F4y2Baα.GyD.F4y2Ba是旋转角度或推力。这些收益与无人机大规模一起,GyD.F4y2BamGyD.F4y2Ba,被指定GyD.F4y2Ba组态GyD.F4y2Ba财产的财产GyD.F4y2BaMultorotor.GyD.F4y2Ba目的。GyD.F4y2Ba
从这些管理方程式,该模型提供以下变量:GyD.F4y2Ba![]()
这些变量与输出匹配GyD.F4y2Ba状态GyD.F4y2Ba功能。GyD.F4y2Ba
参考GyD.F4y2Ba
[1] Randal W.胡子和蒂莫西W. Mclain。“第9章”GyD.F4y2Ba小无人驾驶飞机理论与实践GyD.F4y2Ba,新泽西:普林斯顿大学出版社,2012年。GyD.F4y2Ba
[2] Mellinger,Daniel和Nathan Michael。“具有四分之二的精确侵略性操纵的轨迹生成和控制。”GyD.F4y2Ba国际机器人研究杂志GyD.F4y2Ba。2012,第664-74页。GyD.F4y2Ba
扩展能力GyD.F4y2Ba
也可以看看GyD.F4y2Ba
功能GyD.F4y2Ba
控制GyD.F4y2Ba|GyD.F4y2Ba衍生物GyD.F4y2Ba|GyD.F4y2Ba环境GyD.F4y2Ba|GyD.F4y2BaODE45.GyD.F4y2Ba|GyD.F4y2Baplottransforms.GyD.F4y2Ba|GyD.F4y2Ba状态GyD.F4y2Ba
对象GyD.F4y2Ba
固定翼翼GyD.F4y2Ba|GyD.F4y2BaMultorotor.GyD.F4y2Ba|GyD.F4y2BaUavwayPointFollower.GyD.F4y2Ba
块GyD.F4y2Ba
主题GyD.F4y2Ba
选择一个网站GyD.F4y2Ba
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:GyD.F4y2Ba。GyD.F4y2Ba
选择GyD.F4y2Ba网站GyD.F4y2Ba您还可以从以下列表中选择一个网站:GyD.F4y2Ba
美洲GyD.F4y2Ba
- América拉丁GyD.F4y2Ba(Español)GyD.F4y2Ba
- 加拿大GyD.F4y2Ba(英语)GyD.F4y2Ba
- 美国GyD.F4y2Ba(英语)GyD.F4y2Ba
欧洲GyD.F4y2Ba
- 比利时GyD.F4y2Ba(英语)GyD.F4y2Ba
- 丹麦GyD.F4y2Ba(英语)GyD.F4y2Ba
- 德意志GyD.F4y2Ba(德意志)GyD.F4y2Ba
- España.GyD.F4y2Ba(Español)GyD.F4y2Ba
- 芬兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 法国GyD.F4y2Ba(Français)GyD.F4y2Ba
- 爱尔兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 意大利GyD.F4y2Ba(意大利语)GyD.F4y2Ba
- 卢森堡GyD.F4y2Ba(英语)GyD.F4y2Ba
- 荷兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 挪威GyD.F4y2Ba(英语)GyD.F4y2Ba
- Österreich.GyD.F4y2Ba(德意志)GyD.F4y2Ba
- 葡萄牙GyD.F4y2Ba(英语)GyD.F4y2Ba
- 瑞典GyD.F4y2Ba(英语)GyD.F4y2Ba
- 瑞士GyD.F4y2Ba
- 英国GyD.F4y2Ba(英语)GyD.F4y2Ba
亚太地区GyD.F4y2Ba
- 澳大利亚GyD.F4y2Ba(英语)GyD.F4y2Ba
- 印度GyD.F4y2Ba(英语)GyD.F4y2Ba
- 新西兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 中国GyD.F4y2Ba
- 日本语GyD.F4y2Ba(日本语)GyD.F4y2Ba
- 한국GyD.F4y2Ba(한국어)GyD.F4y2Ba