UAV包交付
此示例通过增量设计迭代显示如何在城市环境中的不同位置实现小型多功能模拟。
打开项目
首先,打开示例实时脚本并通过单击来访问支持文件金宝app打开直播脚本在文档中或使用openExample函数。
OpenExample(“无人机/ UAVPackageDeliveryExample”);
然后,打开Simulink™项金宝app目文件。
撮合下= openProject ('uavpackagedelivery.prj');
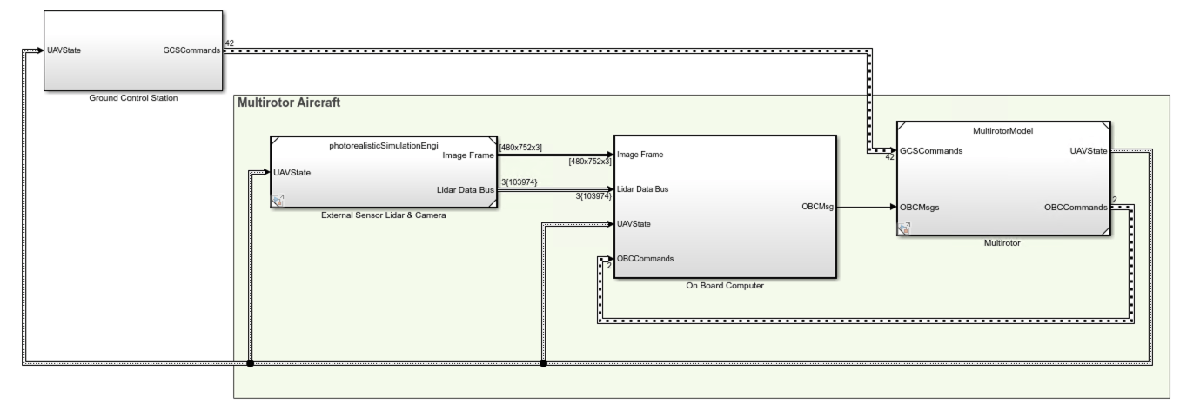
模型体系结构和约定
顶部模型包括以下子系统和模型引用:
地面控制站:用于在飞行中控制和监控飞机。
外部传感器-激光雷达和相机:用于连接以前设计的场景或照片拟真的仿真环境。当飞机通过它时,这些从环境中产生激光雷达读数。
板电脑上:用于实现算法意味着以独立于自动驾驶仪的板载计算机运行。
Multiorotor:包括一个低保真度和中保真度的直升机模式,一个飞行控制器,包括它的制导逻辑。
模型的设计数据包含在Simulink™数据字典中金宝app数据文件夹 (uavPackageDeliveryDataDict.sldd)。此外,模型使用变体子系统(金宝app模型)管理模型的不同配置。放置在基本工作区中的变量配置这些变体,而不需要修改数据字典。
以下示例步骤
使用项目的快捷方式踩到这个例子。每个快捷方式都设置项目所需的变量。

1.入门
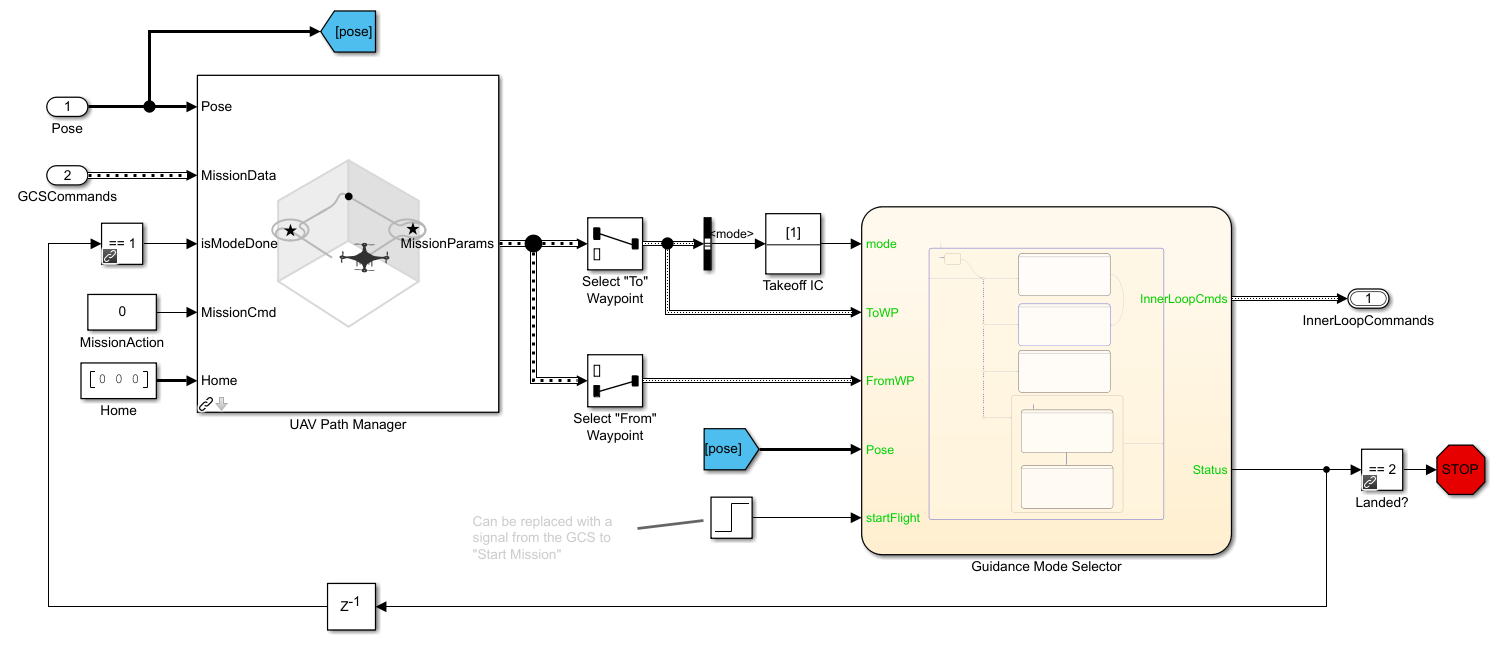
单击开始项目捷径,建立模型为一个四路点任务使用一个低保真多转子工厂模型。运行的uavPackageDelivery该模型以三维图形显示了多旋翼机的起飞、飞行和降落。

该模型使用无人机路径管理器块以确定哪个是整个飞行中的主动航路点。活动的路径点被传递到指导模式选择器StateFlow™图表以生成必要的内环控制命令。
2.连接到GCS
一旦你能够飞行一个基本的任务,你已经准备好集成你的模拟与地面站软件,这样你就可以更好地控制飞机的任务。为此,您需要下载并安装QgroundControl.地面控制站软件。
该模型使用UAV工具箱™Mavlinkio建立Simulink和QgroundControl之间的连接。金宝app连接实现为位于的MATLAB®系统块UAVPACKAGEDELIVERY /地面控制站/获得航班Mission / QGC / MAVLINK接口.
要测试Simulink和QGroundControl之间的连接性,金宝app请遵循以下步骤:
单击连接到GCS项目的快捷方式。
QGroundControl发射。
在QGroundControl中,加载命名为
shortmission.plan.位于/工具/ qgc.运行模拟。
当QGroundControl表示已连接到系统时,上传任务。
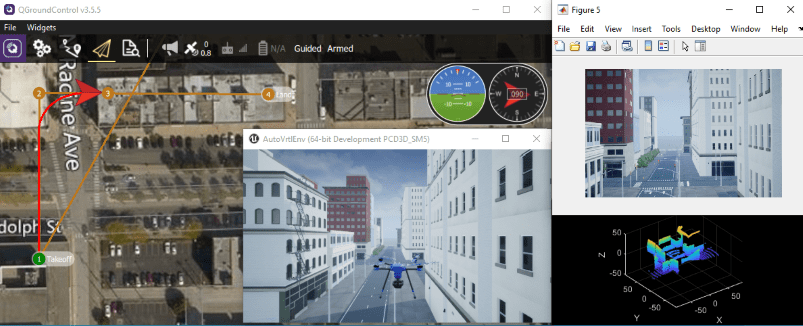
一旦飞机起飞,您应该看到QGC发送的无人机,如下所示。
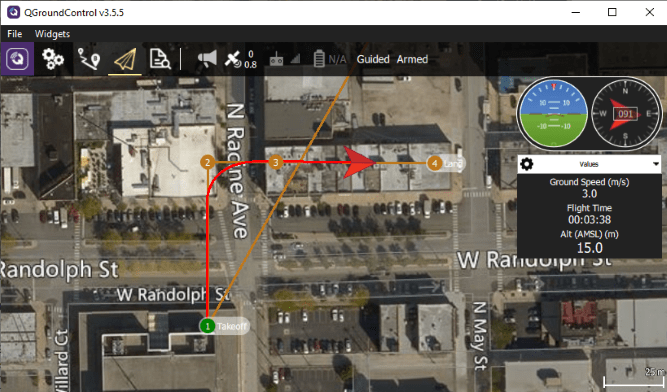
您可以通过添加航点或移动已在任务中的那些来修改任务。上传使命,飞机应响应这些变化。
3.设置长方体方案
现在,飞机模型可以从地面控制站流动,考虑飞机飞行的环境。对于本例,在长方体场景中使用uavScenario对象。该方案基于下图所示的城市块。

为了在这种情况下安全地飞行飞机,您需要一个传感器,该传感器提供有关LIDAR传感器等环境的信息。这个例子使用了一个uavLidarPointCloudGenerator对象添加到无人机场景uavSensor对象。激光雷达传感器模型根据传感器的姿态和环境中的障碍物生成读数。
单击设置长方体场景快捷方式运行该模型。随着模型运行,当飞机飞过长方体环境时,将显示LIDAR点云图像:


4.避障
为了避开环境中的障碍物,模型必须在无人机在环境中执行飞行任务时使用可用的传感器数据。要修改模型配置,请单击避障快捷方式。在长方体环境中出现了一个显示离建筑物最近点的镜。
运行该模型。随着模型的运行,飞机试图在建筑物之间的直线上飞到落地,避免沿途障碍物。注意随着时间的推移距离距离的变化。

5.光电造型模拟
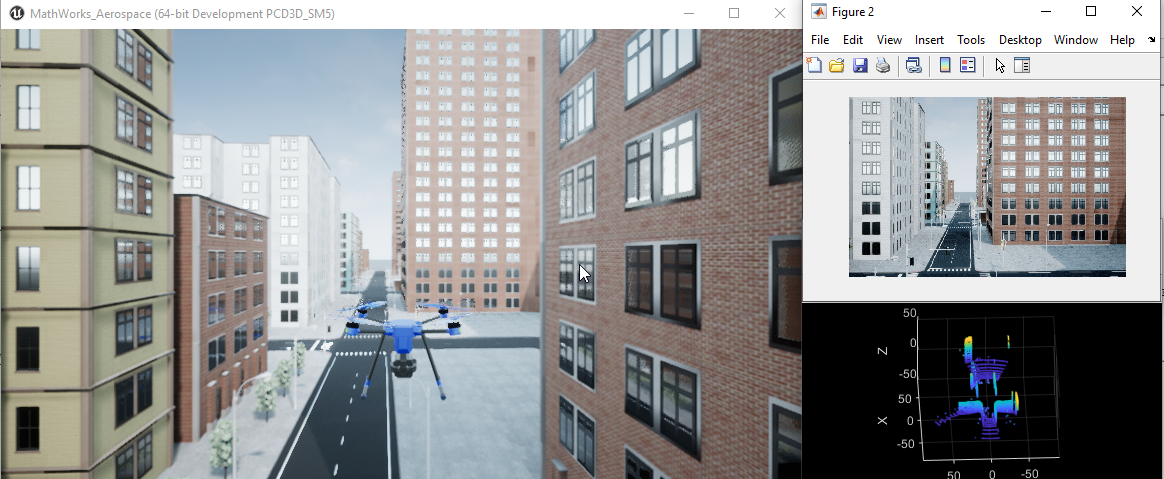
截至目前,环境一直是一个简单的长方体情景。要增加环境的保真度,请单击此处黑色型模拟捷径,将飞机放在更现实的世界中飞过的。位于at的照片ISITIMQUADROTOR变体uavPackageDelivery / photorealisticSimulationEngi / SimulationEnvironmentVariant变得活跃。该变体包含配置仿真环境的必要块和安装在飞机上的传感器:
运行该模型。从步骤1和步骤2开始,飞机将执行相同的任务。注意,当飞机飞行任务的激光雷达点云更新和从正面的相机显示的图像。

6.在逼真的模拟环境中执行完整任务
接下来,单击此处飞完全任务快捷方式,从步骤2开始设置与QGroundControl的连接,以便在逼真的环境中上传任务。按照以下步骤运行模拟:
QGroundControl发射。
在QGroundControl中,加载命名为
shortmission.plan.位于/工具/ qgc.运行仿真。
当QgroundControl表示它连接到系统时,上传任务。
随着飞机开始飞行,您可以通过添加航点或移动已在任务中的那些,在QgroundControl中修改Qgrouncontrol的任务。上传使命,飞机应响应这些变化。在整个航班中,您将看到飞机在场景中飞行。



7.在逼真仿真环境中的飞行避障
接下来,目标是飞行任务,在QGroundControl中指定起飞和着陆点,并使用避障器绕过路径上的障碍物。单击避免全障碍快捷方式并按照以下步骤运行模拟:
QGroundControl发射。
在QGroundControl中,加载命名为
oamision.plan.位于/工具/ qgc.运行仿真。
当QgroundControl表示它连接到系统时,上传任务。
在整个航班中,观看飞机尝试遵循QgroundControl的命令路径,同时尝试避免与环境中的建筑物碰撞。


在飞行期间的某些时候,您将在两个建筑物之间通过狭窄的通行证来看看UAV。


8.为高保真仿真添加6dof植物模型
作为最后一步,单击添加高保真厂它激活位于的无人机模型的高保真型uavpackagdelivery /MultirotorModel/Inner Loop and Plant Model/High-FidelityModel.该变体包含内环控制器和高保真植物模型。

运行该模型。由于高保真模型,行为的次要变化,但无人机才能脱离相同的任务。
当您完成对模型的探索后,关闭项目文件。
关闭(撮合下);
您还可以从以下列表中选择一个网站: