主要内容
uavScenario
生成无人机仿真场景
描述
的uavScenario对象生成一个由静态网格、无人机平台和三维环境中的传感器组成的仿真场景。
创建
现场= uavScenario创建一个带有默认属性值的空UAV场景。默认的惯性框架是东北向下(NED)和东北向上(ENU)框架。
现场= uavScenario (配置一个名称,值)uavScenario对象,其属性使用一个或多个名称,值对参数。的名字属性名和价值为对应值。的名字必须出现在引号内。可以以任意顺序指定多个名称-值对参数Name1, Value1,…,的家.任何未指定的属性都接受默认值。
使用此语法,可以指定UpdateRate,StopTime,HistoryBufferSize,ReferenceLocation,MaxNumFrames属性。属性的其他属性不能指定uavScenario对象,它们是只读的。
属性
对象的功能
设置 |
准备无人机模拟场景 |
addCustomTerrain |
添加自定义地形数据 |
addMesh |
为无人机场景添加新的静态网格 |
addInertialFrame |
在无人机场景中定义新的惯性框架 |
推进 |
一步推进无人机场景仿真 |
updateSensors |
更新无人机场景下的传感器读数 |
removeCustomTerrain |
删除自定义地形数据 |
重新启动 |
无人机场景复位仿真 |
显示 |
2-D可视化无人机场景 |
show3D |
3-D可视化无人机场景 |
terrainHeight |
返回无人机场景中的地形高度 |
例子
创建和模拟无人机场景
创建一个UAV场景并设置其本地原点。
现场= uavScenario (“UpdateRate”, 200,“StopTime”,2,“ReferenceLocation”, 46岁,42岁,0);
加上一个惯性系地图的场景。
scene.addInertialFrame (“ENU表示”,“地图”trvec2tform ((1 0 0)));
在场景中添加一个地面网格和两个圆柱形障碍物网格。
scene.addMesh (“多边形”{[-100 0;100 0;100 100;-100 100],[-5 0]},[0.3 0.3 0.3]);scene.addMesh (“气缸”, {[20 10 10],[0 30]}, [0 10]);scene.addMesh (“气缸”, {[46 42 5],[0 20]}, [0 1 0],“UseLatLon”,真正的);
在场景中创建一个具有指定路径点轨迹的无人机平台。定义无人机平台的网格。
traj = waypointTrajectory (“锚点”, [0 -20 -5;20 -20 5;20 0 5),“TimeOfArrival”[0 1 2]);uavPlat = uavPlatform (“无人机”场景,“轨迹”, traj);updateMesh (uavPlat“quadrotor”, {4}, [1 0 0],eul2tform([0 0 pi]));addGeoFence (uavPlat“多边形”{[-50 0;50 0;50 50;-50年50],[0 100]},真的,“ReferenceFrame”,“ENU表示”);
在无人机平台的前面安装一个INS传感器。
insModel = insSensor ();ins = uavSensor (“英寸”uavPlat insModel,“MountingLocation”, 4 0 0);
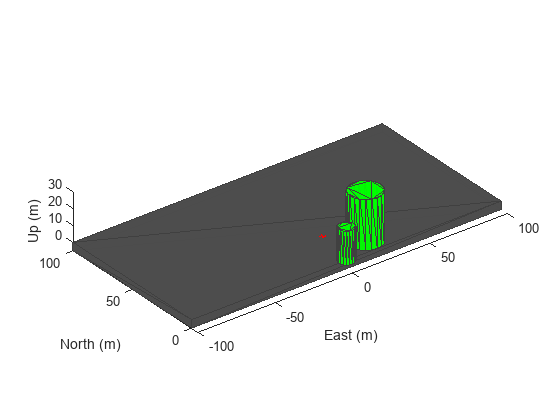
在3d中想象场景。
ax = show3D(现场);轴(ax,“平等”);
模拟的场景。
设置(现场);而推进(场景)更新传感器读数updateSensors(现场);%设想场景show3D(场景,“父”ax,“FastUpdate”,真正的);drawnowlimitrate结束
添加地形和建筑到无人机场景
这个例子展示了如何添加地形和自定义建筑网格到无人机场景。
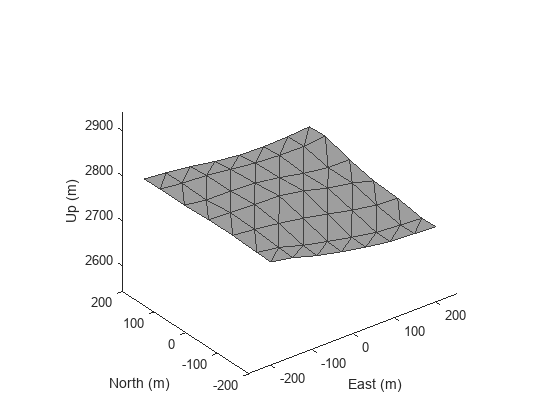
加上地形表面
根据地形高程数据添加地形表面n39_w106_3arc_v2.dt1DTED文件。
addCustomTerrain (“CustomTerrain”,“n39_w106_3arc_v2.dt1”);场景= uavScenario (“ReferenceLocation”, [39.5 -105.5 0]);addMesh(场景中,“地形”, {“CustomTerrain”, [-200 200], [-200 200]}, [0.6 0.6 0.6]);show3D(场景);
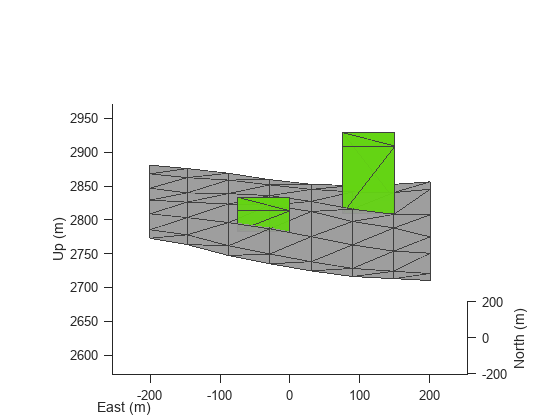
增加建筑
添加一对使用顶点和多边形网格的自定义建筑网格到场景中。使用terrainHeight函数获取每个建筑基地的地面高度。
建筑物中心= [-50,-50;100 100);buildingHeights = [30 100];[-25 -25;-25 50;50 50;50 -25];为idx = 1:size(buildingCenters,1) buildingVertices = buildingBoundary+buildingCenters(idx,:);buildingBase = min (terrainHeight(场景,buildingVertices (: 1), buildingVertices (:, 2)));addMesh(场景中,“多边形”, {buildingVertices, buildingBase+[0 buildingHeights(idx)]}, [0.3922 0.8314 0.0745]);结束show3D(场景);视图(15 [0])
删除自定义地形
移除导入的自定义地形。
removeCustomTerrain (“CustomTerrain”)
介绍了R2020b
你也可以从以下列表中选择一个网站: