addMesh
描述
例子
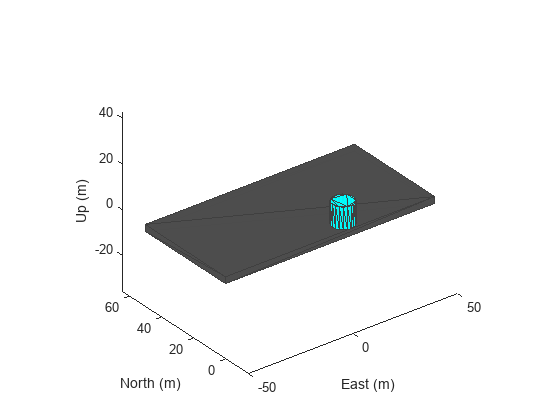
添加网格无人机的场景
创建一个无人机的场景。
现场= uavScenario (“UpdateRate”,100,“StopTime”1);
添加网格的地面和建筑物。
addMesh(场景,“多边形”{[-50 0;50 0;50 50;-50 50],[3 0]}[0.3 0.3 0.3]);addMesh(场景,“气缸”,{[10 5 5],[0 10]},[0 1 1]);
想象的场景。
show3D(现场);
OSM构建网格和地形网格导入到无人机的场景
创建一个无人机场景集中在纽约,并添加一个地形网格基于全球多分辨率地形高程数据(GMTED2010)数据集。
现场= uavScenario (ReferenceLocation = 40.707088 - -74.012146 [0]);xlimits = (-1000 - 1000);ylimits = (-1000 - 1000);颜色= (0.6 0.6 0.6);terrainInfo = addMesh(场景,“地形”,{“gmted2010”xlimits ylimits},颜色、Verbose = true)
terrainInfo =结构体字段:TerrainName:“gmted2010”LatitudeRange: 90年[-90]LongitudeRange: (-180 180)
show3D(现场);

添加建筑通过导入它们从一个OSM文件包含曼哈顿的建筑,manhattan.osm。[1]
xlimits = (-800 - 800);ylimits = (-800 - 800);颜色= (0 0 1);osmInfo = addMesh(场景,“建筑”,{“manhattan.osm”xlimits ylimits,“汽车”},颜色,Verbose = true)
osmInfo =结构体字段:OSMFileName:“/ mathworks /猛击/ sbs / 25 / rprasad.Bdoc23a.j2033780.Aug12 / matlab工具箱/共享/ openstreetmapdata /曼哈顿。osm“LatitudeRange: [40.7010 - 40.7182] LongitudeRange: [-74.0188 - -74.0003] TotalNumBuildings: 836 NumImportedBuildings: 657
show3D(现场);

[1]是下载的文件https://www.openstreetmap.org,它提供了访问世界各地的众包地图数据。数据开放数据共享开放数据库许可下的(ODbL),https://opendatacommons.org/licenses/odbl/。
输入参数
输出参数
提示
OSM文件可以加载缓慢,当大量的建筑中指定的文件中。如果你经历长时间加载,请考虑减少建筑物的数量来加载更快。
版本历史
介绍了R2020b