terrainHeight
描述
例子
加上地形和建筑物无人机的场景
这个例子展示了如何添加地形和自定义构建网格无人机的场景。
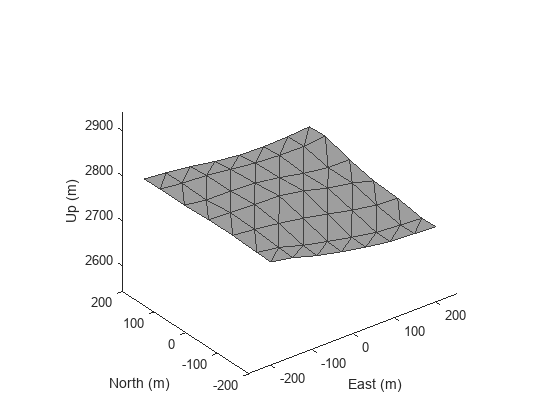
加上地形表面
加上地形表面基于地形高程数据n39_w106_3arc_v2.dt1DTED文件。
addCustomTerrain (“CustomTerrain”,“n39_w106_3arc_v2.dt1”);场景= uavScenario (“ReferenceLocation”39.5 - -105.5 [0]);addMesh(场景中,“地形”,{“CustomTerrain”200年[-200],[-200 200]},(0.6 0.6 0.6));show3D(场景);
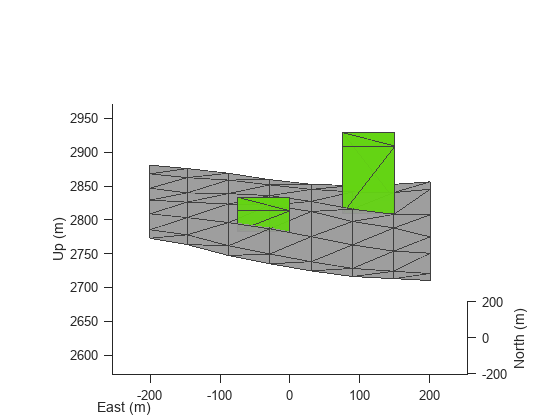
增加建筑
添加一些自定义构建网格使用顶点和多边形网格的场景。使用terrainHeight函数来获得每个构建基地的地面高度。
buildingCenters = [-50、-50;100 100);buildingHeights = (100);buildingBoundary = (-25 -25;-25 50;50 50;50 -25];为idx = 1:尺寸(buildingCenters, 1) buildingVertices = buildingBoundary + buildingCenters (idx:);buildingBase = min (terrainHeight(场景,buildingVertices (: 1), buildingVertices (:, 2)));addMesh(场景中,“多边形”,{buildingVertices buildingBase + [0 buildingHeights (idx)]}, (0.3922 0.8314 0.0745));结束show3D(场景);视图(15 [0])
删除自定义地形
删除自定义导入的地形。
removeCustomTerrain (“CustomTerrain”)
输入参数
输出参数
版本历史
介绍了R2021a