主要内容
推进
推进无人机场景模拟时间步
语法
描述
正在=进步(场景)场景一个时间步。的UpdateRate财产的uavScenario对象决定了在仿真时间步。函数返回的运行状态模拟。函数仅更新一个平台位置如果平台有一个指定的轨迹。
例子
模拟简单的无人机场景
创建一个无人机的场景。
现场= uavScenario (“UpdateRate”,100,“StopTime”1);
添加网格的地面和建筑物。
addMesh(场景,“多边形”{[-50 0;50 0;50 50;-50 50],[3 0]}[0.3 0.3 0.3]);addMesh(场景,“气缸”,{[10 5 5],[0 10]},(1 1 0));
创建一个无人机平台指定的路径轨迹的场景。定义的网格无人机平台。
traj = waypointTrajectory (“锚点”-20年,[0 5;20 0 5),“TimeOfArrival”[0,1]);uavPlat = uavPlatform (“无人机”场景,“轨迹”,traj);updateMesh (uavPlat“quadrotor”{10},(1 0 0),eul2tform ([0 0 0]));
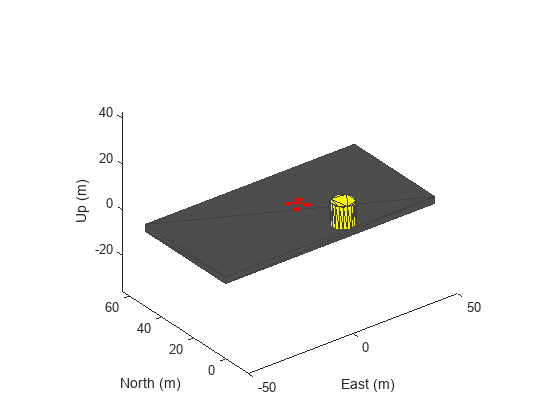
模拟和可视化场景。
设置(现场);而推进(场景)show3D(现场);drawnow更新结束
重启(现场);
输入参数
输出参数
介绍了R2020b