显示
描述
例子
在2 d可视化无人机的场景
创建一个无人机的场景。
现场= uavScenario (“UpdateRate”,1“StopTime”,1000,“HistoryBufferSize”,1000);
创建一个无人机平台指定的路径轨迹的场景。
traj = waypointTrajectory (“锚点”,(0 -20000 -50;10000 100000 -50;20000 0 -50),“TimeOfArrival”[0 500 1000]);uavPlat = uavPlatform (“无人机”场景,“轨迹”,traj);
想象在2 d轨道。
设置(现场);而推进(场景)结束显示(场景,0:1:1000)
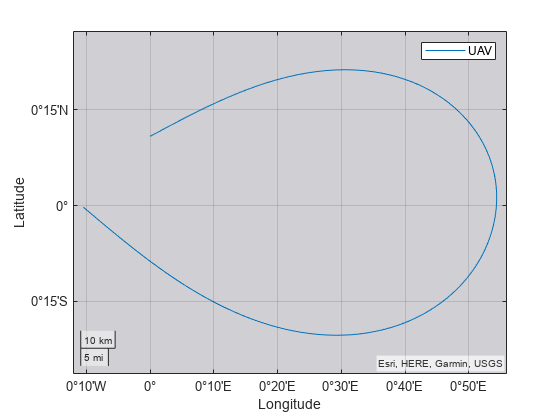
ans = GeographicAxes属性:基础图:“streets-light”位置:[0.1300 0.1100 0.7750 0.8150)单位:“规范化”显示所有属性
输入参数
输出参数
版本历史
介绍了R2020b