minjerkpolytraj
通过锚点生成最小反射轨迹
语法
描述
例子
计算最小混蛋为二维平面运动轨迹
使用minjerkpolytraj函数与一个给定的一组二维xy锚点。对路径点给出时间点。
wpt = [1 4 4 3 2 0;0 1 2 3 4 1];tpt = 0:5;
指定输出轨迹的样本数量。
numsamples = 100;
计算最小反射轨迹。函数输出轨迹的位置(问)、速度(qd)、加速度(qdd)和混蛋(qddd在给定的样本的数量。
(q, qd、qdd qddd, pp,时间点,tsamples] = minjerkpolytraj (wpt, tpt numsamples);
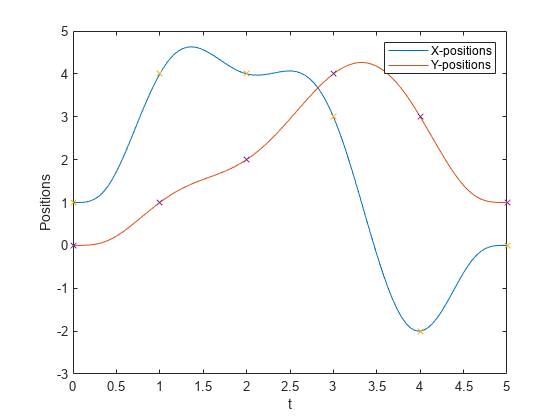
情节的轨迹x -和y职位。比较每个路标的轨迹。
情节(tsamples q)在情节(wpt的时间点,“x”)包含(“t”)ylabel (“职位”)传说(“坐标”,“坐标”)举行从
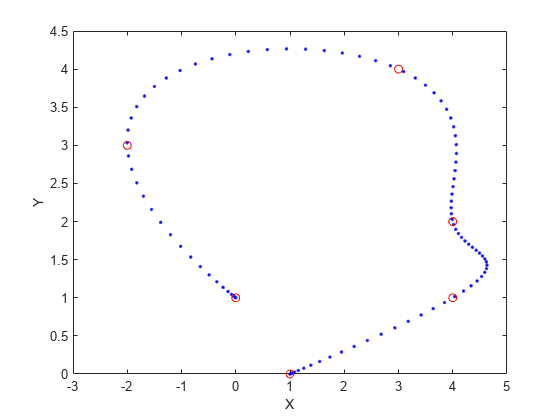
你也可以验证实际的位置在二维平面上。情节的单独的行问向量和锚点x -和y -的位置。
图绘制(q (1:), q (2:)“。b”wpt (:), wpt (2:)”或“)包含(“X”)ylabel (“Y”)
输入参数
输出参数
引用
[1]Bry、亚当、亚伯拉罕Bachrach,查尔斯·里希特和尼古拉斯·罗伊。“激进的固定翼和Quadrotor飞机飞行密度室内环境。”国际机器人研究杂志》上34岁的没有。7(2015年6月):969 - 1002。
[2]里,查尔斯,亚当Bry和尼古拉斯·罗伊。“多项式轨迹规划积极Quadrotor飞行在浓密的室内环境。”机器人研究的论文发表在国际研讨会(2013年ISRR),2013年。