主要内容
minsnappolytraj
生成通过路径点的最小抓拍轨迹
语法
描述
例子
计算二维平面运动的最小抓拍轨迹
使用minsnappolytraj函数与给定的二维集合xy锚点。同时给出了路径点的时间点。
WPTS = [1 4 4 3 -2 0;0 1 2 4 3 1];TPTS = 0:5;
指定输出轨迹中的样本数量。
Numsamples = 100;
计算最小抓拍轨迹。函数输出轨迹位置(问),速度(qd),加速度(qdd),混蛋(qddd),以及snaps (qdddd)。
[q,qd,qdd,qddd,qdddd,pp,时间点,tsamples] = minsnappolytraj(wpts,tpts,numsamples);
画出轨道x -和y职位。将轨迹与每个航路点进行比较。
情节(tsamples q)在情节(wpt的时间点,“x”)包含(“t”) ylabel (“职位”)传说(“坐标”,“坐标”)举行从
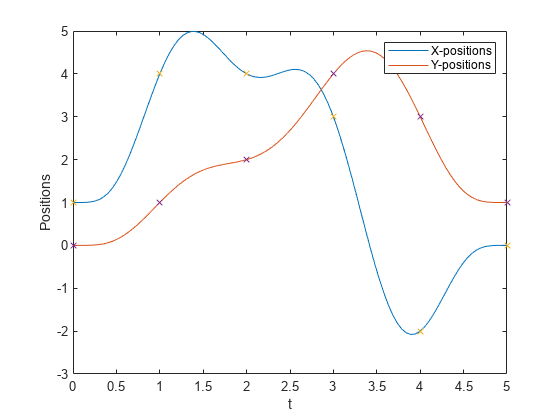
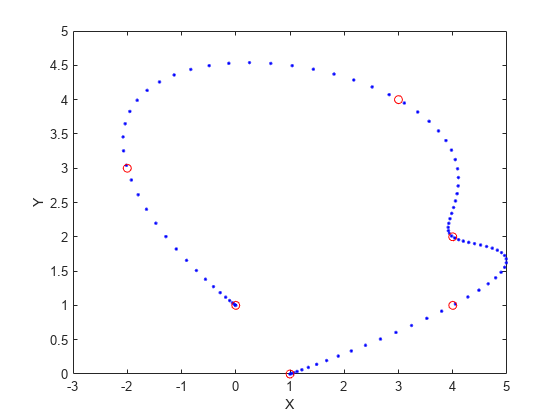
您也可以验证在二维平面中的实际位置。的单独行问向量和路径点为x -和y -的位置。
图绘制(q (1:), q (2:)“。b”wpt (:), wpt (2:)”或“)包含(“X”) ylabel (“Y”)
输入参数
输出参数
参考文献
Bry, Adam, Charles Richter, Abraham Bachrach和Nicholas Roy。固定翼和四旋翼飞机在密集室内环境中的激进飞行国际机器人研究杂志34岁,没有。7(2015年6月):969-1002。
[2]里克特,查尔斯,亚当·布里和尼古拉斯·罗伊。密集室内环境中四旋翼飞行的多项式轨迹规划在机器人研究国际研讨会(ISRR 2013)上发表的论文, 2013年。
扩展功能
R2021b中引入
您也可以从以下列表中选择一个网站: