规划四旋翼飞行器的最小弹跳轨迹
该示例演示了如何使用优化的快速探索随机树(RRT*)路径规划器,在3D地图上规划多旋翼无人机(UAV)从起始位姿到目标位姿的最小快速轨迹(最小控制努力)。
在此示例中,您设置了3D映射,提供了一个启动姿势和目标姿势,使用3D直线连接来平铺与RRT *,并通过所获得的航点拟合最小的快速轨迹。
最初设定
配置可重复结果的随机数生成器。
RNG(100,“扭转”)
加载地图
加载3D占用地图uavMapCityBlock.mat,其中包含一组预先生成的障碍,并将其添加到工作区中。占领地图是在一个东-北-上(ENU)框架。
mapdata = load(“uavmapcityblock.mat”);OMAP = mapdata.omap;%考虑未取消的空间的核心。FreeThreshold = omap.OccupiedThreshold;显示(omap)
设定开始姿势和目标姿势
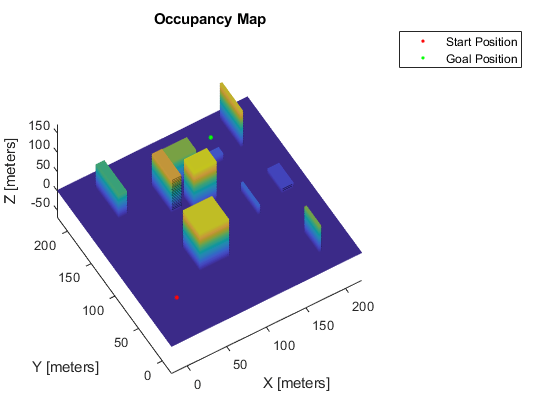
使用地图进行引用,选择轨迹的未占用的开始姿势和目标姿势。
startPose = [12 22 25 0.7 0.2 0 0.1];%[x y z qw qx qy qz]goalPose = [150 180 35 0.3 0 0.1 0.6];绘制开始和目标姿势持有在散射3(血统(1),血统(2),纵向(3),100,“.r”) scatter3 (goalPose (1), goalPose (2), goalPose(3), 100年,“.g”)视图([-31 63])图例("",“起始位置”,“目标位置”) 抓住离开
使用SE(3)状态空间使用RRT*规划路径
RRT*是一个基于树的运动规划器,它从给定状态空间的随机样本增量地构建搜索树。树最终跨越搜索空间并连接开始状态和目标状态。将这两个状态用直线连接SolultSpacese3.目的。使用validatoroccupancymap3d.目标,用于多旋翼无人机与环境的碰撞检测。
定义状态空间对象
的SolultSpacese3.对象将状态空间定义为[x y z qw qx qy qz], 在哪里[x y z]指定无人机的位置,单位为米和[qw qx qy qz]指定方向为四元数。指定位置和方向边界的四旋翼作为一个7 × 2矩阵。方向边界是可选的,可以设置为负和inf如果他们不适用。
ss = stateSpaceSE3([-20 220;-20 220;-10 100;正正;正正;正正;正正]);
定义状态验证器对象
的validatoroccupancymap3d.对象确定状态无效时XYZ.-地图上的位置已被占用。只有当所有中间状态都有效时,两个状态之间的运动才有效,这意味着无人机没有通过地图上任何被占用的位置。创建一个validatoroccupancymap3d.通过指定状态空间对象和膨胀的地图来指定对象。然后将验证距离设置为以米为单位,以便在状态之间插值。
sv = validatorOccupancyMap3D (ss,地图= omap);sv。ValidationDistance = 0.1;
设置RRT * Path Planner
创建一个plannerRRTStar通过将状态空间和状态验证器指定为输入来指定对象。设定maxconnectiondistance.,GoalBias,MaxIterations,ContinueaftergoalReached., 和MaxNumTreeNodes属性来优化返回的路径点。
Planner = PlannerRrtstar(SS,SV);Planner.MaxConnectionDistance = 50;Planner.GoalBias = 0.8;Planner.maxIterations = 1000;planner.continuaftergoalReached = True;Planner.maxnumtreenodes = 10000;
执行路径规划
在三维空间中执行基于RRT*的路径规划,获取路径点。规划师找到了一条无碰撞且适合四旋翼飞行器的飞行路径。解决方案信息对于调整计划器很有帮助。
[Pthobj,Solninfo] =计划(策划者,血统,守纵向);
可视化路径
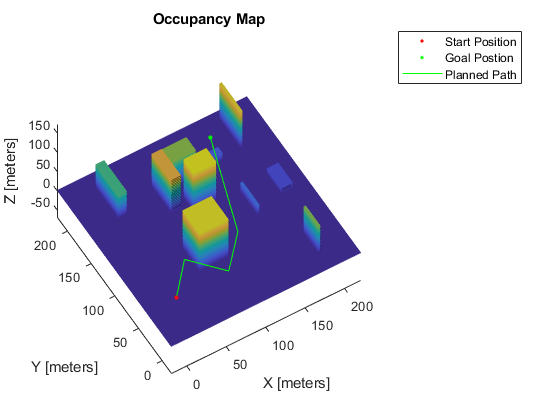
检查RRT*规划器是否找到了路径。如果规划者找到了路径,绘制路径点。否则,终止脚本。
如果(〜solninfo.ispathfound)disp(“RRT找不到路径,终止示例”)返回结尾%绘图地图,开始姿势和目标姿势显示(OMAP)持有在散射3(血统(1),血统(2),纵向(3),100,“.r”) scatter3 (goalPose (1), goalPose (2), goalPose(3), 100年,“.g”)%绘制路径规划器计算的路径plot3 (pthObj.States (: 1) pthObj.States (:, 2), pthObj.States (:, 3),“g”)视图([-31 63])图例("",“起始位置”,“目标”位置,“计划路径”) 抓住离开
生成最小快照UAV轨迹
最初规划的路径在朝着目标前进的过程中有一些尖角。将得到的路径点拟合到最小突点轨迹,生成光滑的轨迹minsnappolytraj.函数。为了初始估计达到每个航点所需的时间,假设UAV以恒定的速度移动。
调整轨迹和飞行时间,指定numsamples.,timeallocation., 和延时争论的论点minsnappolytraj.函数。
路点= pthObj.States;nWayPoints = pthObj.NumStates;%计算航点之间的距离距离= 0(1、nWayPoints);为i = 2:nwaypoints距离(i)= norm(航点(i,1:3) - 航点(i-1,1:3));结尾%假设UAV速度为3米/秒并计算所花费的时间以达到每个航点UAVspeed = 3;时间点= cumsum(距离/ UAVspeed);nSamples = 100;%沿轨迹计算状态initialStates = minsnappolytraj(锚点的时间点,nSamples MinSegmentTime = 4, MaxSegmentTime = 20, TimeAllocation = true, TimeWeight = 100) ';
想象的轨迹
可视化获得的最小快速轨迹。
%绘图地图,开始姿势和目标姿势显示(OMAP)持有在startPose scatter3 (startPose (1) (2), startPose(3), 30岁,“.r”) scatter3 (goalPose (1), goalPose (2), goalPose(3), 30岁,“.g”)%绘制航路点plot3 (pthObj.States (: 1) pthObj.States (:, 2), pthObj.States (:, 3),“g”)%绘制最小的快照轨迹Plot3(InitialStates(:,1),InitialStates(:,2),InitialStates(:,3),“可能是”)视图([-31 63])图例("",“起始位置”,“目标”位置,“计划路径”,“最初的轨迹”) 抓住离开

生成有效的最小快照轨迹
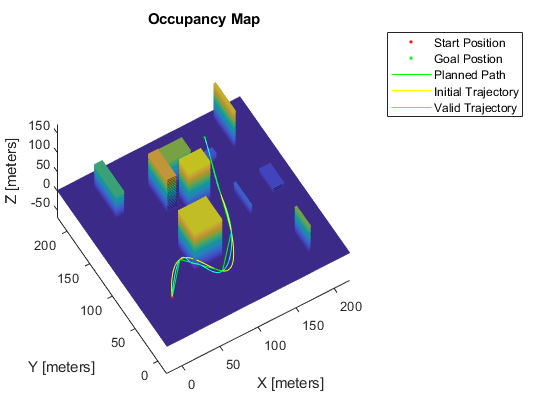
注意,生成的飞行轨迹有一些无效状态,这些状态不是无障碍的。你必须修改路径点以便生成的轨迹是无障碍的。为了避免无效状态,可以在无效轨迹的一对路径点之间的线段上添加中间路径点。迭代插入路径点,直到整个轨迹有效为止。
检查弹道是否有效= initialstates;有效=全部(IsStateValid(SV,状态));尽管(~有效)%检查各州的有效性有效性= IsStateValid(SV,状态);%将状态映射到相应的路点段semmentindices = examplehelpermapstateTestopathsegments(航点,状态);获取无效状态的段%使用unique,因为同一段中的多个状态可能无效InvalidSegments =唯一(eymentIndices(〜有效性));%在无效段上添加中间航点为i = 1:大小(InvalidSegments)段= InvalidSegments(i);%采取位置的中点以获得中间位置中点(1:3)=(航点(段,1:3)+航点(段+ 1,1:3))/ 2;球面插值四元数得到中间四元数中点(4:7)= SLERP(四元度(航点(段,4:7)),四元度(航点(段(段+ 1,4:7)),.5).compact;waypoints = [waypoints(1:段,:);中点;航点(段+ 1:结束,:)];结尾nWayPoints =大小(锚点,1);距离= 0(1、nWayPoints);为i = 2:nwaypoints距离(i)= norm(航点(i,1:3) - 航点(i-1,1:3));结尾计算到达每个路径点所花费的时间时间点= cumsum(距离/ UAVspeed);nSamples = 100;州= minsnappolytraj(锚点、时间点、nSamples MinSegmentTime = 2, MaxSegmentTime = 20, TimeAllocation = true, TimeWeight = 5000) ';%检查新轨迹是否有效有效=全部(IsStateValid(SV,状态));结尾
可视化最终有效轨迹
可视化最终有效的最小快速轨迹。
%绘图地图,开始和目标姿势显示(OMAP)持有在startPose scatter3 (startPose (1) (2), startPose(3), 30岁,“.r”) scatter3 (goalPose (1), goalPose (2), goalPose(3), 30岁,“.g”)%绘制航路点plot3 (pthObj.States (: 1) pthObj.States (:, 2), pthObj.States (:, 3),“g”)绘制初始轨迹Plot3(InitialStates(:,1),InitialStates(:,2),InitialStates(:,3),“可能是”)%绘制最终有效的轨迹plot3(状态(:1),状态(:,2),状态(:,3),“-C”)视图([-31 63])图例("",“起始位置”,“目标”位置,“计划路径”,“最初的轨迹”,“有效的轨迹”) 抓住离开
您还可以从以下列表中选择一个网站: