在虚幻的引擎环境中模拟简单的飞行场景和传感器
UAV工具箱™提供块用于可视化传感器在模拟环境中使用来自Epic Games®的虚幻引擎®。该模型模拟了一个简单的飞行场景在一个预先构建的场景,并从场景中使用鱼眼相机传感器捕获数据。使用此模型可以学习配置和模拟场景、车辆和传感器的基础知识。有关虚幻引擎模拟环境的更多背景,请参阅无人机的虚幻引擎仿真.
模型概述
该模型由以下主要组件组成:
您可以使用如下命令打开该型号。
open_system (“uav_simple_flight_model.slx”)

检查现场
在模拟3D场景配置块中,场景名称参数决定了模拟发生的场景。此模型使用我们街区现场。要探索一个场景,你可以打开与虚幻引擎场景相对应的2D图像。
imshow (“USCityBlock.jpg”,...“XData”[-242.998152046784, 200.198152046784],...“YData”[-215.598152046784, 227.598152046784]);集(gca),“YDir”,“正常”)

这个块的场景视图参数决定了虚幻引擎窗口显示场景的视图。在这个块中,场景视图被设置为场景的根(场景原点),选择根。你也可以改变场景视图到四旋翼无人机。
检查车辆
仿真三维无人机车辆块模型的四轴飞行器,命名Quadrotor1在这个场景中。在模拟过程中,四旋翼围绕场景中心飞行一个半径为5米、高程为1.5米的完整圆。四旋翼偏航的视点在飞行方向上从左向右摆动偏航。
为了创建更真实的轨迹,您可以从场景中交互式地获取路径点,并将这些路径点指定为Simulation 3D UAV Vehicle块的输入。参见选择路径点的虚幻引擎模拟。
检查传感器
仿真3D鱼眼摄像机块模型在场景中使用的传感器。打开这个块并检查它的参数。
的越来越多的TAB包含确定传感器安装位置的参数。鱼眼相机传感器沿着自我车辆中心的x轴向前安装0.1米。
的参数TAB包含鱼眼相机的固有相机参数。这些参数设置为它们的默认值,除了映射系数,其中第二个系数设置为-0.0005模型镜头失真。
的地面实况TAB包含一个参数,用于以米和弧度输出传感器的位置和方向。在这个模型中,块输出这些值,这样您就可以看到它们在模拟过程中是如何变化的。
该块输出从模拟中捕获的图像。在模拟过程中,视频查看器块显示这些图像。

模拟模型
模拟模型。当模拟开始时,可视化引擎可能需要几秒钟的时间来初始化,特别是当您第一次运行它时。的MathWorks_Aerospace窗口显示了虚幻引擎环境中的场景视图。
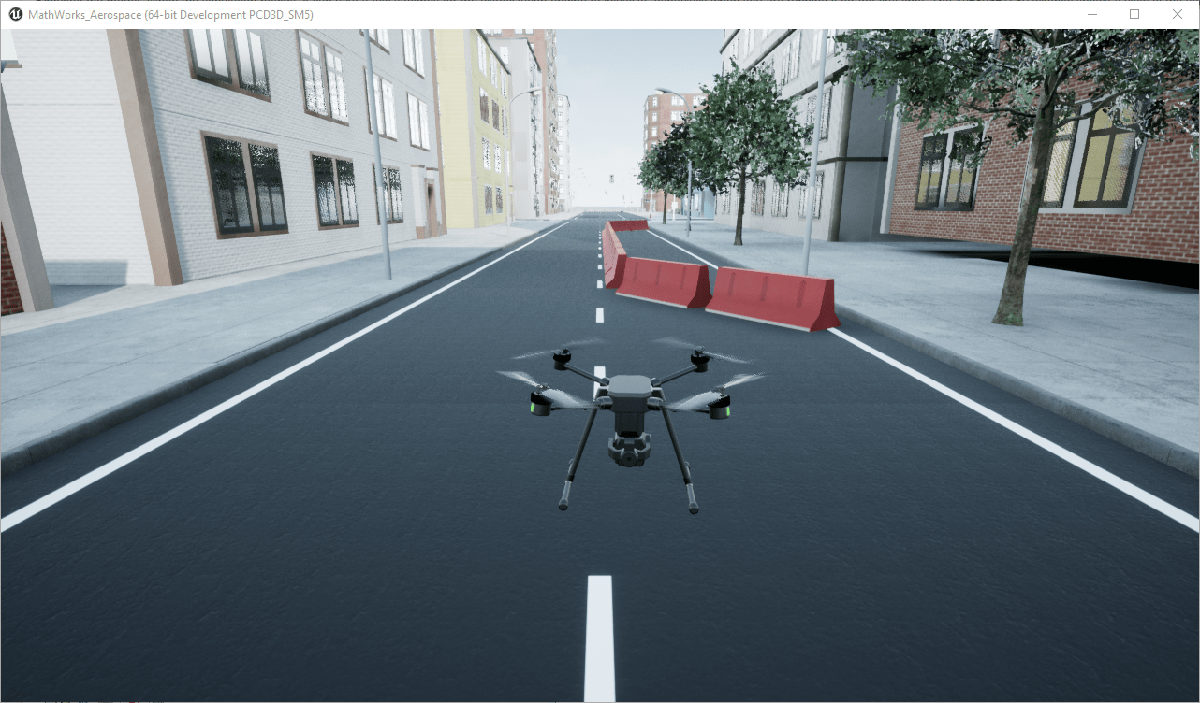
要在模拟过程中改变场景的视图,请使用数字键盘上的数字1-9。如需鸟瞰现场,请按0。
对模型进行仿真后,尝试修改摄像机固有参数,观察仿真效果。还可以更改传感器块的类型。例如,尝试用3D仿真摄像机块替换3D仿真鱼眼摄像机。有关可用传感器块的更多详细信息,请参见为虚幻引擎模拟选择一个传感器.
另请参阅
你也可以从以下列表中选择一个网站: