模拟3 d无人机
库:
无人机工具箱/模拟3 d
描述
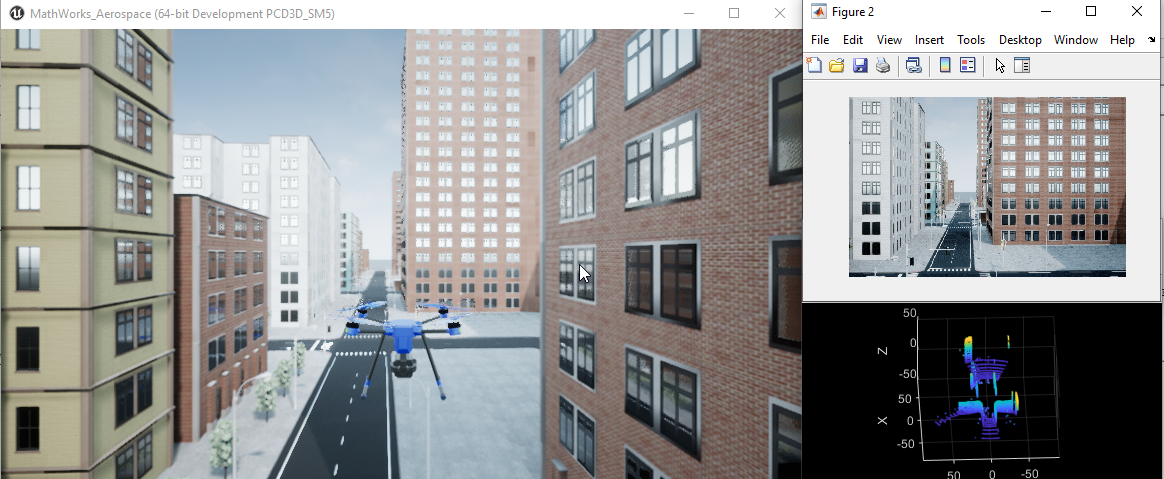
的模拟3 d无人机块实现了无人机(UAV)的3 d仿真环境。使用虚幻引擎呈现这种环境®从史诗般的游戏®。块使用输入(X,Y,Z)位置和输入(卷,球场,偏航)在模拟无人机的态度。
要使用这个块,确保模拟3 d场景配置块是在你的模型。如果你设置样品时间参数的模拟3 d无人机块1块继承了样本中指定的时间模拟3 d场景配置块。
请注意
的模拟3 d无人机块前必须执行模拟3 d场景配置块。这样,模拟3 d无人机之前准备的信号数据块虚幻引擎3 d可视化环境接收它。检查块的执行顺序,右键单击模块并选择属性。在一般选项卡,确认这些优先级设置:
模拟3 d场景配置- - - - - -
0模拟3 d车辆- - - - - -
1
关于执行顺序的更多信息,请参阅块执行顺序。