坐标系统虚幻引擎在无人机仿真工具箱
无人机的工具箱使您能够模拟你的驾驶算法在虚拟环境中使用虚幻引擎®从史诗般的游戏®。一般来说,在这种环境下使用的坐标系统描述的约定坐标系统的建模(航天工具箱)。然而,当模拟在这个环境中,重要的是要注意的具体差异和坐标系统的实现细节。
无人机的工具箱使用这些坐标系统来计算车辆动力学和位置虚幻引擎中的对象可视化环境。
环境 |
描述 |
坐标系统 |
|---|---|---|
无人机车辆动力学仿真软件金宝app® |
的右手定则建立了X- - - - - -Y- - - - - -Z序列和坐标轴的旋转用于计算车辆动力学。的无人机的工具箱接口使用虚幻引擎模拟环境右撇子(RH)笛卡儿坐标系统:
|
|
虚幻引擎可视化 |
虚幻引擎位置对象和查询可视化环境,无人机的工具箱使用一个左手定则世界坐标系统。 |
固地(惯性)坐标系统
固地坐标系统(XE,YE,ZE)轴是固定在一个惯性参考系。惯性参考系的零线性和角加速度和角速度为零。在牛顿物理学中,地球是一个惯性参考。
| 轴 | 描述 |
|---|---|
| XE | 的XE车辆的轴是前进的方向。 的XE和YE轴是平行于地平面。地平面是一个水平面正常重力矢量。 |
| YE | |
| ZE | 在Z取向,积极的一面ZE轴点向上。 在Z(定位、积极的一面ZE轴点向下。 |
身体(惯性)坐标系统
模型飞机和宇宙飞船是简单的如果你使用一个坐标系统固定在身体本身。飞机的前进方向是修改的风,在空中飞行器的运动是不一样的运动相对于地面。惯性体坐标系是固定的起源和方向移动的工艺。工艺假定为刚性。身体坐标轴的方向是固定的形状的身体。
的
x通过工艺的鼻子设在点。的
y设在指向右边的x设在(面对飞行员的方向的视图),垂直于x设在。的
z设在点通过底部的工艺,垂直于x- - - - - -y飞机,满足了RH的规则。
平动自由度
翻译是由沿着这些轴的距离x,y,z从原点。
![]()
转动自由度
转动的欧拉角定义P,问,R或ΦΘΨ。他们是
P或Φ:卷的x设在问或Θ:有关y设在R或Ψ:偏航有关z设在
除非另有指定,默认情况下,该软件使用ZYX为欧拉角旋转。
虚幻引擎世界坐标系统
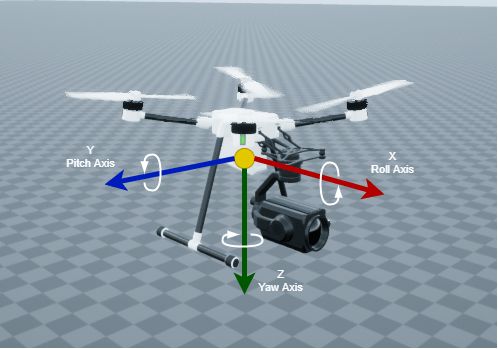
虚幻引擎环境使用左手定则世界坐标系的轴固定在惯性参考系。
![]()
| 轴 | 描述 |
|---|---|
| X | 车辆的前进方向 滚,右手转动X设在 |
| Y | 延伸到右边的车辆,平行于地平面 ——右手旋转Y设在 |
| Z | 向上扩展 偏航——左旋转Z设在 |