虚幻引擎无人机仿真
无人机的工具箱提供了一个在Simulink中建模驱动算法的联合仿真框架金宝app®并在虚拟仿真环境中可视化他们的表现。这个环境使用虚幻引擎®从史诗般的游戏®.
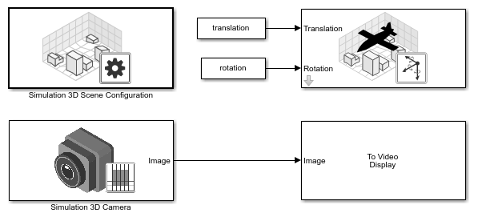
金宝app与Simulink相关的仿真环境块可以在无人机的工具箱>模拟三维块库。这些区块提供了以下功能:
在模拟环境中配置预构建场景。
在这些场景中放置和移动无人机。
在车上安装摄像头和激光雷达传感器。
根据无人机周围的环境模拟传感器输出。
获取地面真实数据,用于语义分割和深度信息。
该仿真工具是在开发、测试和验证无人机飞行算法性能时常用的补充真实数据的工具。结合无人机车辆模型,您可以使用这些模块来执行真实的闭环仿真,包括整个无人机飞行控制堆栈,从感知到控制。
有关仿真环境的详细信息,请参见无人机的虚幻引擎仿真是如何工作的.
虚幻引擎模拟块
访问无人机的工具箱>模拟三维图书馆,在MATLAB®命令提示符,输入uavsim3dlib.
场景
要将模型配置为与仿真环境协同仿真,请添加模拟3D场景配置块到模型。使用这个块,你可以从一个预先构建的场景中选择,在那里你可以测试和可视化你的驾驶算法。下面的图片来自我们街区现场。
工具箱包括这些场景。
| 场景 | 描述 |
|---|---|
| 我们街区 | 有十字路口、路障和交通灯的城市街区 |
如果你有无人机工具箱界面虚幻引擎项目金宝app支持包,然后你可以修改这些场景或创建新的场景。有关详细信息,请参见为无人机定制虚拟引擎场景.
车辆
要在场景中定义虚拟车辆,请添加三维无人机飞行器仿真块到您的模型。使用此块,您可以通过提供X、Y和偏航值来控制车辆的运动,这些值定义了车辆在每个时间步骤中的位置和方向。车辆在地面上自动移动。
您还可以指定车辆的颜色和类型。工具箱包括这些车辆类型:
传感器
您可以定义虚拟传感器并将其连接到车辆上的不同位置。工具箱包括这些传感器建模和配置块。
| 块 | 描述 |
|---|---|
| 模拟3 d相机 | 带镜头的相机模型。包括图像大小、焦距、失真和倾斜的参数。 |
| 模拟3D鱼眼摄像机 | 可使用Scaramuzza相机模型描述的鱼眼相机。包括畸变中心、图像大小和映射系数的参数。 |
| 模拟3 d激光雷达 | 扫描激光雷达传感器模型。包括探测范围、分辨率和视野的参数。 |
有关选择传感器的详细信息,请参见为虚幻引擎模拟选择一个传感器.
算法测试与可视化
无人机的工具箱仿真模块提供了测试和可视化路径规划、无人机控制和感知算法的工具。
路径规划与车辆控制
你可以使用虚幻引擎模拟环境在预构建场景中可视化车辆的运动。这个环境为您提供了一种方法来分析路径规划和车辆控制算法的性能。在Simulink中设计这些算法后,就可以使用金宝appuavsim3dlib用于在其中一个预构建场景中可视化车辆运动的库。
感知
无人机的工具箱为详细的相机和激光雷达传感器建模提供几个模块。通过在虚拟环境中的无人机上安装这些传感器,您可以生成合成传感器数据或传感器检测,以根据感知算法测试传感器模型的性能。
闭环系统
在模拟环境中设计和测试感知系统后,你就可以用它来驱动控制系统,从而真正控制车辆。在这种情况下,无人机使用感知系统自行飞行,而不是手动设置轨迹。通过将感知和控制结合到3D仿真环境中的闭环系统中,您可以开发和测试更复杂的算法,如自动交付。
您还可以从以下列表中选择网站: