GPS传感器
GPS接收机仿真模型
描述
的GPS传感器系统对象™ 对全球定位系统(GPS)接收器输出的数据进行建模。
要为GPS接收器建模,请执行以下操作:
创建
GPS传感器对象,并设置其属性。使用参数调用对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?.
创建
描述
全球定位系统(GPS)= gpsSensorGPS传感器基于局部位置和速度输入信号计算全球定位系统接收读数的系统对象。大地坐标的默认参考位置是
纬度:0oN
经度:0oE
高度:0米
全球定位系统(GPS)=GPS传感器(“ReferenceFrame”,射频)GPS传感器计算相对于参考坐标系的全球定位系统接收机读数的系统对象射频.指定射频作为NED的(东北向下)或‘ENU’(East-North-Up)。默认值为NED的.
全球定位系统(GPS) = gpsSensor (___,每个属性集名称,值)的名字到指定的价值.未指定的属性具有默认值。
属性
用法
输入参数
输出参数
对象的功能
要使用对象函数,请指定System对象作为第一个输入参数。例如,释放名为system的对象的系统资源obj,请使用以下语法:
释放(obj)
例子
从静止输入生成GPS位置测量
创建一个GPS传感器系统对象™ 为GPS接收机数据建模。假设典型的1 Hz采样率和1000秒模拟时间。根据马萨诸塞州纳蒂克的纬度、经度和海拔(LLA)定义参考位置。通过用零指定真实位置和速度,将传感器定义为静止。
fs = 1;时间= 1000;numSamples = * fs持续时间;refLoc = [42.2825 -71.343 53.0352];truePosition = 0 (numSamples, 3);trueVelocity = 0 (numSamples, 3);全球定位系统(gps) = gpsSensor (“SampleRate”,财政司司长,“ReferenceLocation”, refLoc);
呼叫全球定位系统(gps)与指定的真实位置和真速度模拟接收固定平台的GPS数据。
位置=gps(真实位置、真实速度);
绘制位置的真实位置和GPS传感器读数。
t = (0: (numSamples-1)) / fs;Subplot (3,1,1) plot(t, position(:,1),...t、 一个(numSamples)*refLoc(1))标题(“GPS传感器读数”)伊拉贝尔(的纬度(度)子图(3,1,2)plot(t, position(:,2),...t的(numSamples) * refLoc (2)) ylabel (的经度(度)) subplot(3,1,3) plot(t, position(:,3),...t的(numSamples) * refLoc (3)) ylabel (的高度(米))xlabel(‘时间’)
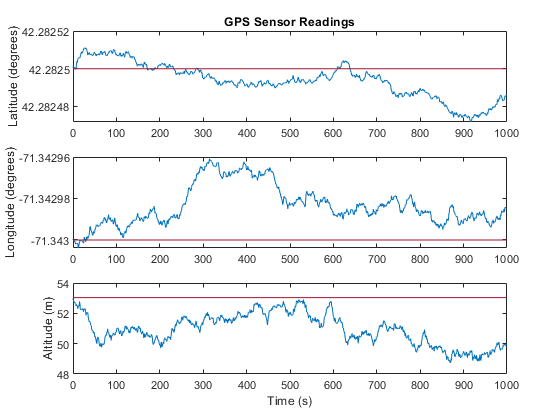
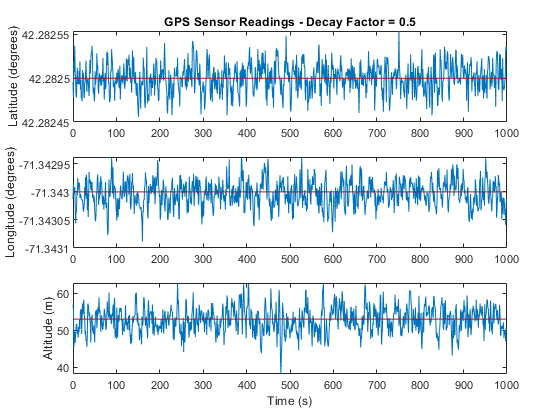
位置读数有噪声,由控制HorizontalPositionAccuracy,VerticalPositionAccuracy,速度精度和衰变因子这个衰变因子属性控制噪声模型中的漂移。默认情况下,衰变因子设置为0.999,近似于随机漫步过程。观察其效果衰变因子财产:
重置
全球定位系统(gps)对象集
衰变因子来0.5.呼叫
全球定位系统(gps)具有指定固定位置的变量。绘制结果。
的全球定位系统(GPS)位置读数现在围绕真实位置振荡。
重置(gps) gps。衰变因子= 0.5; position = gps(truePosition,trueVelocity); subplot(3, 1, 1) plot(t, position(:,1),...t、 一个(numSamples)*refLoc(1))标题('GPS传感器读数-衰减系数=0.5')伊拉贝尔(的纬度(度)子图(3,1,2)plot(t, position(:,2),...t的(numSamples) * refLoc (2)) ylabel (的经度(度)) subplot(3,1,3) plot(t, position(:,3),...t的(numSamples) * refLoc (3)) ylabel (的高度(米))xlabel(‘时间’)
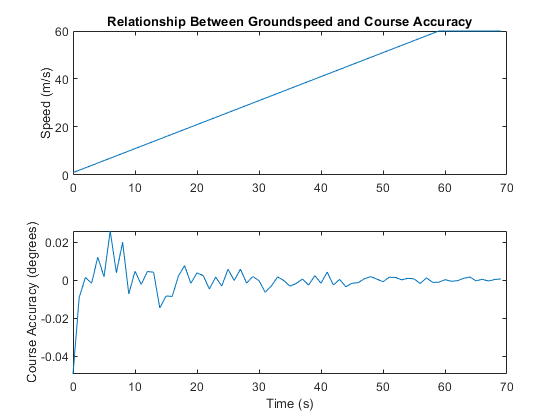
地面速度与航向精度的关系
随着地面速度的增加,GPS接收器实现了更大的航向精度。在本例中,您创建了一个GPS接收器模拟对象,并模拟从一个从静止位置加速的平台接收的数据。
创建一个默认的GPS传感器系统对象™用于建模GPS接收器返回的数据。
GPS=GPS传感器
GPS=GPS传感器及其属性:采样器:1 Hz位置输入格式:“本地”参考位置:[0 0][deg deg m]水平位置精度:1.6 m垂直位置精度:3 m速度精度:0.1 m/s随机流:“全局流”衰减因子:0.999
创建矩阵以描述NED坐标系中平台的位置和速度。平台从静止位置开始,在60秒内加速至东北60 m/s,然后在2秒内垂直加速至2 m/s,然后以2 m/s的速度再爬升8秒。假设速度恒定,例如速度是位置的简单导数。
时间= 70;numSamples = * GPS.SampleRate持续时间;课程= 45 *的(持续时间,1);水平速度=[(一60);60 * 1 (1)];Nvelocity =水平。*信德(课程);Evelocity =水平。* cosd(课程);Dvelocity = [0 (60, 1); 1; 2 * 1 (9,1)];NEDvelocity = [Nvelocity、Evelocity Dvelocity];Ndistance = cumsum (Nvelocity);Edistance = cumsum (Evelocity); Ddistance = cumsum(Dvelocity); NEDposition = [Ndistance,Edistance,Ddistance];
模型GPS测量数据调用全球定位系统(GPS)使用速度和位置矩阵创建对象。
[~, ~, groundspeedMeasurement courseMeasurement] = GPS (NEDposition NEDvelocity);
绘制地面速度以及真实航向与GPS模拟器返回的航向之间的差异。
随着地面速度的增加,航向的准确性也会增加。注意,在最后十秒速度的增加没有影响,因为额外的速度不在地平面上。
t = (0: numSamples-1) / GPS.SampleRate;次要情节(2,1,1)情节(t,水平速度);ylabel (‘速度(米/秒)’)头衔(“地面速度和航向精度之间的关系”) subplot(2,1,2) courseAccuracy = coursemmeasurement - course;情节(t, courseAccuracy)包含(‘时间’);伊莱贝尔(‘航向精度(度)’)
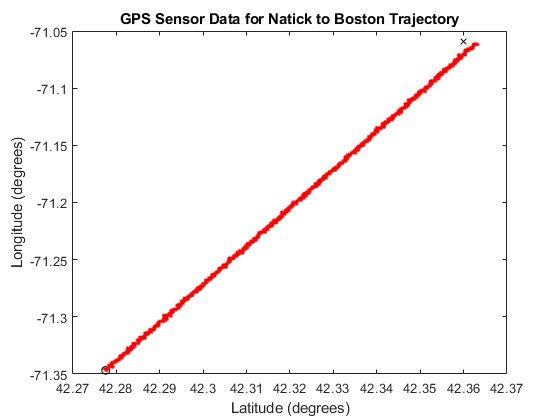
GPS接收机数据模型
模拟从马萨诸塞州纳蒂克市到马萨诸塞州波士顿的轨道期间接收到的GPS数据。
定义美国马萨诸塞州纳蒂克市和美国马萨诸塞州波士顿市的十进制纬度和经度。为简单起见,将这两个位置的高度设置为零。
纳蒂克拉=[42.2775280999999,-71.3468090999997,0];波士顿拉=[42.3600825,-71.0588800000001,0];
定义一个可以在20分钟内将站台从纳蒂克带到波士顿的动作。将本地NED坐标系的原点设置为Natick。创建一个航路点轨迹对象输出轨迹,每次10个样本。
fs = 1;时间= 60 * 20;轴承= 68;%度距离=25.39e3;%米distanceEast =距离*信德(轴承);distanceNorth =距离* cosd(轴承);NatickNED = (0, 0, 0);波士顿= (distanceNorth distanceEast 0);轨迹= waypointTrajectory (...“航路点”(NatickNED;波士顿),...“到达时间”,[0;持续时间],...“SamplesPerFrame”,10,...“SampleRate”fs);
创建一个GPS传感器对象为平台接收GPS数据建模。设定HorizontalPositionalAccuracy来25和衰变因子来0.25强调噪音。设置ReferenceLocation在洛杉矶的纳蒂克坐标。
全球定位系统(GPS) = gpsSensor (...“水平定位精度”25岁的...“DecayFactor”, 0.25,...“SampleRate”,财政司司长,...“ReferenceLocation”,纳蒂奇拉);
打开图表,绘制出Natick和Boston在LLA的位置。简单起见,忽略高度。
在循环中,调用GPS传感器目标与地面真实轨道,以模拟接收的GPS数据。绘制地面真实轨迹和接收的GPS数据模型。
图(1)情节(NatickLLA (1) NatickLLA (2),“高”,...BostonLLA BostonLLA (1) (2),“kx”)xlabel(的纬度(度))伊拉贝尔(的经度(度))头衔(“纳蒂克至波士顿轨道的GPS传感器数据”)持有在…上虽然~isDone(轨迹)[TruePositioned,~,trueVelocityNED]=轨迹();reportedPositionLLA=GPS(truePositionNED,trueVelocityNED);图(1)绘图(reportedPositionLLA(:,1),reportedPositionLLA(:,2),“r”。)结束
作为最佳实践,在完成时释放系统对象。
发布(GPS)发布(轨迹)
扩展功能
您还可以从以下列表中选择网站: