独立悬架 - 麦克弗森
麦弗逊式独立悬架
- 库:
车辆动力学模块/悬挂
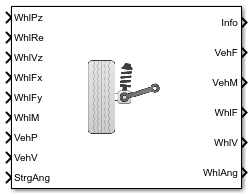
描述
的独立悬架 - 麦克弗森块实现了独立的麦克弗森悬挂多轴与多个轨道每个轴。
该块模型的悬架柔度,阻尼和几何效应作为相对位置和速度的车辆和轮架与轴特定的柔度和阻尼参数的函数。利用悬架柔度和阻尼,计算悬架力对车辆和车轮。该模块使用Z-down坐标系统(在SAE J670中定义)。
| 为每一个 | 您可以指定 |
|---|---|
轴 |
|
追踪 |
|
该块包含能量存储的弹簧元件和能量耗散阻尼器元件。它不包含能量储存的质量元素。该块假定车辆(浇口)和车轮(术语)块连接到块的块存储质量相关的悬架能量。
此表总结了具有以下内容的块参数设置:
两个车轴
每轴两条轨道
前轴上的两个轨道的转向角度输入
前桥上的防摇杆
| 参数 | 环境 |
|---|---|
| 轴数,numaxl |
|
轮轴的轨道数,NumTracksByAxl |
|
| 通过轴,Strgenyaxl实现转向轴 |
|
| 防摇摆轴使轴,AntiSwayEnByAxl |
|
悬架柔度和阻尼
该块使用线性弹簧和阻尼器来模拟悬架系统的垂直动态效应。利用车辆和轮架的相对位置和速度,该块计算对车轮和车辆的垂直悬挂力。该块使用一个线性方程,将垂直阻尼和顺应性与悬架高度、悬架高度变化率和转向角度绝对值联系起来。
块实现了这种等式。
阻尼系数,c, 取决于使活跃的阻尼参数设置。
使活跃的阻尼环境 |
阻尼 |
|---|---|
从 |
持续的,c=cz一个 |
在 |
查表,是主动阻尼器占空比和执行器速度的函数
|
该块假定悬浮元件没有质量。因此,施加于车辆的悬架力和力矩等于施加于车轮的悬架力和力矩。
该块设置车轮的位置和速度等于车辆的横向和纵向位置和速度。
方程式使用这些变量。
| FWZ.在,米WZ.在 | 施加于轮轴上的悬架力和力矩 |
| FWX.在,米WX.在 | 施加于轮轴上的悬架力和力矩 |
| FWY.在,米WY.在 | 施加于轮轴上的悬架力和力矩 |
| Fvz.在,米vz.在 | 悬浮力和时刻施加到车轴上的车辆 |
| FVX.在,米VX.在 | 悬浮力和时刻施加到车轴上的车辆 |
| Fvy.在,米vy.在 | 悬浮力和时刻施加到车轴上的车辆 |
| FZ0.一个 | 垂直悬架弹簧预紧力施加到轴上的轮子上 |
| kz一个 | 垂直弹簧常数适用于车轴上的轨道 |
| 米HSTEER.一个 | 到垂直力倾斜的转向角在车轮架上施加在轴上的轨道 |
| δ.驾驶在 | 轴的转向角输入 |
| cz一个 | 施加于车轴上轨道的垂直阻尼常数 |
| 关于w在 | 轴的有效车轮半径 |
| FZhstop.在 | 在轴上的垂直硬搏斗力 |
| Fzaswy在 | 轴的垂直防摇力 |
| zv在,żv在 | 车轴的车辆位移和速度 |
| zw在,żw在 | 车轴上的轨道位移和速度 |
| xv在,Xv在 | 车轴的车辆位移和速度 |
| xw在,Xw在 | 车轴上的轨道位移和速度 |
| yv在,ẏv在 | 车轴的车辆位移和速度 |
| yw在,ẏw在 | 车轴上的轨道位移和速度 |
| H在 | 轴上的悬架高度 |
| 关于w在 | 轴上有效的车轮半径一个、跟踪t |
硬防星力量
硬止反馈力,FZhstop.在,块适用的块取决于暂停是否压缩或扩展。该块适用于力量:
在压缩时,当悬架被压缩超过最大距离时悬挂最大高度,Hmax范围。
在延长时,当悬架扩展大于由此指定的最大扩展时悬挂最大高度,Hmax范围。
为了计算力,块使用基于双曲切线和指数缩放的刚度。
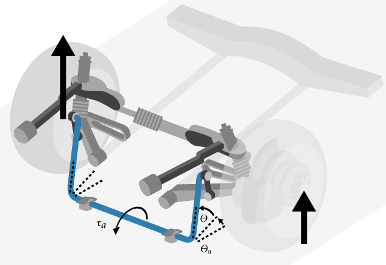
抗摇杆
可选的是,该块实现了一个防摇摆杆力,Fzaswy在,对于有两个轨道的轴。该图示出了防摇杆如何在共用轴上的两个独立悬架轨道之间传输扭矩。每个独立悬架通过从防摇杆延伸回独立悬架连接点的半径臂将扭矩施加到防摇摆杆。
为了计算摇动条力,块实现这些方程。
| 计算 | 方程 |
|---|---|
给定轴和轨道的防摇杆角偏转,Δθ在 |
|
防摇杆扭角,ϴ一个 |
|
防摇杆扭矩,τ.一个 |
|
施加于轮轴上的防摇摆杆力 |
|
方程和图形使用这些变量。
| τ.一个 | 防摇杆扭矩 |
| θ. | 防摇杆扭角 |
| θ.0a. | 防摇杆的初始扭转角 |
| Δθ在 | 轴上的防摇杆角偏转一个、跟踪t |
| r | 防摇杆臂半径 |
| z0 | 防摇杆连接点到防摇杆中心线的垂直距离 |
| Fzsway在 | 施加在轮轴上的防摇摆杆力 |
| zv在 | 车辆轴位移 |
| zw在 | 轮轴位移 |
弧度,脚角和脚趾角
为了计算弯曲,施法者和脚趾角度,块使用悬架高度和转向角的线性函数。
方程式使用这些变量。
| ξ在 | 车轮对车轴的外倾角 |
| η.在 | 轮子的脚轮角度在轴上的 |
| ζ在 | 车轮对车轴的趾角 |
| ξ0a.,η.0a.,ζ0a. | 标称悬架轴轴,脚轮和脚趾角,分别以零转向角 |
| 米hcamber一个,米Hcaster.一个,米ht一个 | 弯度,脚轮,和脚趾角度,分别,悬挂高度斜度为轴 |
| 米Cambersteer一个,米Casterse一个,米送礼一个 | 弧形,施法者和脚趾角度,与轴的转向角坡 |
| 米HSTEER.一个 | 转向角度与轴的垂直力斜率 |
| δ.驾驶在 | 轴的转向角输入 |
| zv在 | 车辆轴位移 |
| zw在 | 轴上跟踪位移 |
操舵角
可选地,您可以输入轨道的转向角。为了计算车轮的转向角,块用悬架高度的线性函数偏离输入转向角。
该等式使用这些变量。
| 米送礼一个 | 轴 |
| 米HSTEER.一个 | 轴 |
| 米ht一个 | 轴 |
| δ.whlsteer在 | 轮轴转向角 |
| δ.驾驶在 | 轴的转向角输入 |
| zv在 | 车辆轴位移 |
| zw在 | 轴上跟踪位移 |
电力和能源
该模块计算每个轴的悬挂特性,一个、跟踪、t.
| 计算 | 方程 |
|---|---|
散货,Psusp在 |
|
吸收能量,Esusp在 |
|
悬挂高度,H在 |
|
从轮架中心到轮胎/道路界面的距离 |
|
方程式使用这些变量。
| 米HSTEER.一个 | 到垂直力倾斜的转向角在车轮架上施加在轴上的轨道 |
| δ.驾驶在 | 轴的转向角输入 |
| 关于w在 | 轴 |
| FZ0.一个 | 垂直悬架弹簧预紧力施加到轴上的轮子上 |
| zwtr在 | 从轮架中心到轮胎/道路界面的距离,沿车辆固定z-轴 |
| zv在,żv在 | 车轴的车辆位移和速度 |
| zw在,żw在 | 车轴上的轨道位移和速度 |
港口
输入
输出
参数
参考
[1]吉难表,托马斯。车辆动力学基础.沃兰德,PA:1992年汽车工程师协会。
车辆动力标准委员会。车辆动力学术语.SAE J670。沃雷德,帕:汽车工程师协会,2008年。
[3]技术委员会。道路车辆。车辆动力学和道路保持能力。词汇.ISO 8855:2011。日内瓦,瑞士:国际标准化组织,2011年。
扩展能力
你也可以从以下列表中选择一个网站: