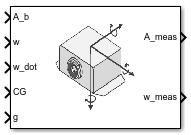
三轴惯性测量单元gydF4y2Ba
实现三轴惯性测量单元(IMU)gydF4y2Ba
- 库:gydF4y2Ba
车辆动力学Blockset /传感器gydF4y2Ba
描述gydF4y2Ba
的gydF4y2Ba三轴惯性测量单元gydF4y2Ba块实现了惯性测量单元(IMU)包含一个三轴加速度计和三轴陀螺仪。gydF4y2Ba
的描述方程和应用程序的错误,明白了gydF4y2Ba三轴加速度计gydF4y2Ba(航天Blockset)gydF4y2Ba和gydF4y2Ba三轴陀螺仪gydF4y2Ba(航天Blockset)gydF4y2Ba。gydF4y2Ba
限制gydF4y2Ba
Vibropendulous误差、滞后影响anisoelastic偏差和anisoinertial偏差不占这一块。gydF4y2Ba
这一块并不打算模型的内部动力学不同形式的乐器。gydF4y2Ba
港口gydF4y2Ba
输入gydF4y2Ba
输出gydF4y2Ba
参数gydF4y2Ba
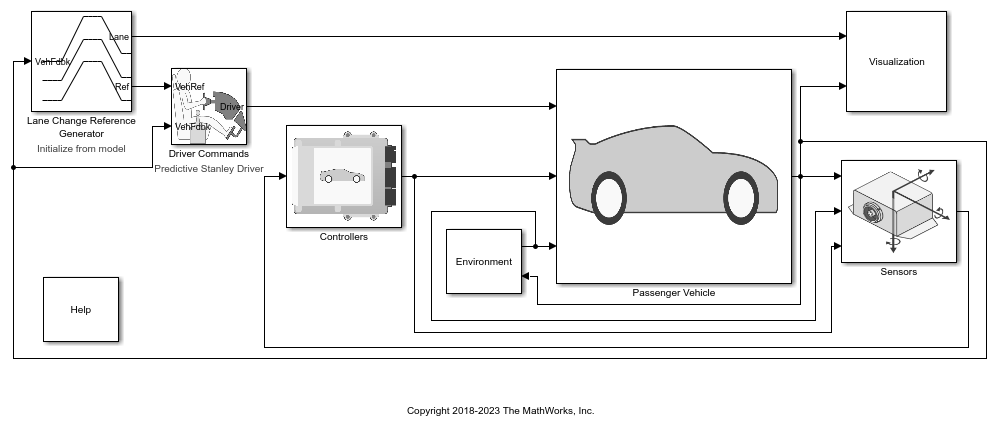
模型的例子gydF4y2Ba
引用gydF4y2Ba
[1]罗杰斯,r·M。gydF4y2Ba在组合导航系统中应用数学gydF4y2Ba张仁教育系列,2000。gydF4y2Ba
扩展功能gydF4y2Ba
版本历史gydF4y2Ba
另请参阅gydF4y2Ba
三轴陀螺仪gydF4y2Ba(航天Blockset)gydF4y2Ba|gydF4y2Ba三轴加速度计gydF4y2Ba(航天Blockset)gydF4y2Ba
你也可以从下面的列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba