车辆身体3自由度gydF4y2Ba
三维刚性车身计算纵向,横向和偏航运动gydF4y2Ba
- 库:gydF4y2Ba
车辆动力学区块集/车身gydF4y2Ba
描述gydF4y2Ba
的gydF4y2Ba车辆身体3自由度gydF4y2BaBlock实现了一个刚性的两轴车身模型来计算纵向、横向和偏航运动。由于加速和转向导致的车轴之间的空气动力阻力和车身质量。gydF4y2Ba
在车辆动力学和自动驾驶研究中,当车辆俯仰、侧倾和垂直运动不显著时,使用此模块模拟非完整车辆运动。gydF4y2Ba
在车辆动力学块集中™ 图书馆,有两种类型的gydF4y2Ba车辆身体3自由度gydF4y2Ba积木模型纵向,横向和偏航运动。gydF4y2Ba
| 块gydF4y2Ba | 车辆跟踪设置gydF4y2Ba | 实施gydF4y2Ba |
|---|---|---|
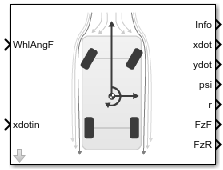
单线车体三维模型gydF4y2Ba |
|
|
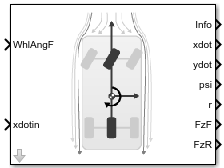
车身3DOF双轨gydF4y2Ba |
|
力作用于车辆的四个角或gydF4y2Ba硬点gydF4y2Ba。gydF4y2Ba |
使用gydF4y2Ba轴力gydF4y2Ba参数指定力的类型。gydF4y2Ba
| 轴力设置gydF4y2Ba | 实施gydF4y2Ba |
|---|---|
|
|
|
|
|
|
可以使用这些块参数创建其他输入端口。此表总结了设置。gydF4y2Ba
输入信号面板参数gydF4y2Ba |
输入端口gydF4y2Ba | 描述gydF4y2Ba |
|---|---|---|
前轮转向gydF4y2Ba |
|
前轮角,gydF4y2BaδgydF4y2BaFgydF4y2Ba |
外部风gydF4y2Ba |
|
风速、gydF4y2BaWgydF4y2BaXgydF4y2Ba,gydF4y2BaWgydF4y2BaYgydF4y2Ba,gydF4y2BaWgydF4y2BaZgydF4y2Ba,在惯性参照系中gydF4y2Ba |
| 外部力量gydF4y2Ba | FExtgydF4y2Ba |
对车辆重心(CG)的外力,gydF4y2BaFgydF4y2BaxgydF4y2Ba,gydF4y2BaFgydF4y2BaygydF4y2Ba,gydF4y2BaFgydF4y2BazgydF4y2Ba,在车辆固定框架内gydF4y2Ba |
| 后轮转向gydF4y2Ba | WhlAngRgydF4y2Ba |
后轮角,gydF4y2BaδgydF4y2BaRgydF4y2Ba |
| 外摩擦gydF4y2Ba | μgydF4y2Ba |
摩擦系数gydF4y2Ba |
| 外部的时刻gydF4y2Ba |
|
关于车辆重心的外部力矩,gydF4y2Ba米gydF4y2BaxgydF4y2Ba,gydF4y2Ba米gydF4y2BaygydF4y2Ba,gydF4y2Ba米gydF4y2BazgydF4y2Ba,在车架固定gydF4y2Ba |
| 结力gydF4y2Ba | 跳频gydF4y2Ba |
在挂接装置位置施加在车身上的挂接装置力,gydF4y2Ba跳频gydF4y2BaxgydF4y2Ba,gydF4y2Ba跳频gydF4y2BaygydF4y2Ba,gydF4y2Ba跳频gydF4y2BazgydF4y2Ba,在车辆固定框架内gydF4y2Ba |
| 挂接时刻gydF4y2Ba | MhgydF4y2Ba |
在故障点的故障时刻,gydF4y2BaMhgydF4y2BaxgydF4y2Ba,gydF4y2BaMhgydF4y2BaygydF4y2Ba,gydF4y2BaMhgydF4y2BazgydF4y2Ba,关于车架gydF4y2Ba |
最初的纵向位置gydF4y2Ba |
|
初始车辆重心位移沿土方固定gydF4y2BaXgydF4y2Ba设在,米gydF4y2Ba |
初始横向位置gydF4y2Ba |
|
初始车辆重心位移沿土方固定gydF4y2BaYgydF4y2Ba设在,米gydF4y2Ba |
初始纵向速度gydF4y2Ba |
|
初始车辆CG速度沿车辆固定gydF4y2BaxgydF4y2Ba设在m / sgydF4y2Ba |
初始横向速度gydF4y2Ba |
|
初始车辆CG速度沿车辆固定gydF4y2BaygydF4y2Ba设在m / sgydF4y2Ba |
初始偏航角gydF4y2Ba |
|
车辆固定架绕地球固定架的初始旋转gydF4y2BaZgydF4y2Ba-轴(偏航),单位为radgydF4y2Ba |
初始偏航率gydF4y2Ba |
|
车辆绕车辆的初始角速度gydF4y2BazgydF4y2Ba-轴(偏航率),单位为rad/sgydF4y2Ba |
气温gydF4y2Ba |
AirTempgydF4y2Ba |
环境空气温度。如果您想在运行时改变温度,请考虑此选项。gydF4y2Ba |
理论gydF4y2Ba
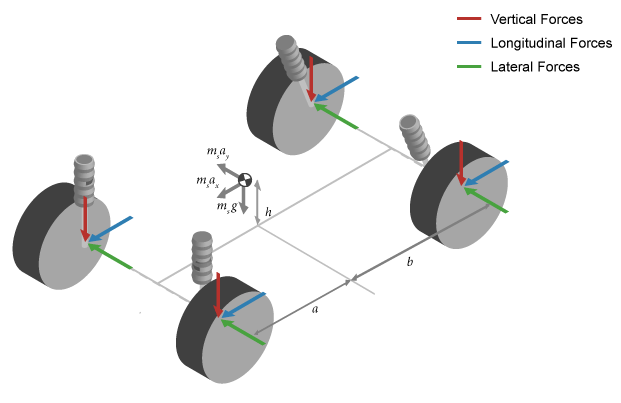
的gydF4y2Ba车辆身体3自由度gydF4y2Bablock采用刚性双轴车身模型来计算纵向、横向和偏航运动。block考虑车身质量、气动阻力以及由于加速度和转向而导致的轴间重量分布。为了确定车辆运动,block采用单轨、双轨和阻力cal的这些方程计算。gydF4y2Ba
单线gydF4y2Ba
| 计算gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
动力学gydF4y2Ba |
块体利用这些方程计算刚体平面动力学。gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba要么gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba到gydF4y2Ba
|
外部力量gydF4y2Ba |
外力包括阻力和外力输入。作用力作用在车辆重心上。gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba到gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba到gydF4y2Ba
在重量和载荷传递过程中,块体将法向力除以公称法向载荷来改变有效摩擦参数。该块使用这些方程来保持俯仰和滚动平衡。gydF4y2Ba
|
轮胎力gydF4y2Ba |
块体利用局部速度、纵向速度和横向速度的比值来确定滑移角。gydF4y2Ba
为了确定轮胎的力,块使用滑移角。gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba到gydF4y2Ba
|
双声道gydF4y2Ba
| 计算gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
动力学gydF4y2Ba |
块体利用这些方程计算刚体平面动力学。gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba到gydF4y2Ba
|
外部力量gydF4y2Ba |
外力包括阻力和外力输入。作用力作用在车辆重心上。gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba到gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba到gydF4y2Ba
在重量和载荷传递过程中,块体将法向力除以公称法向载荷来改变有效摩擦参数。该块使用这些方程来保持俯仰和滚动平衡。gydF4y2Ba
|
轮胎力gydF4y2Ba |
块体利用局部速度、纵向速度和横向速度的比值来确定滑移角。gydF4y2Ba
该块利用转向角度将轮胎力转换到车辆固定框架。gydF4y2Ba
如果你设置gydF4y2Ba轴力gydF4y2Ba到gydF4y2Ba
|
拖gydF4y2Ba
| 计算gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
坐标变换gydF4y2Ba |
该块将风速从惯性框架转换为车辆固定框架。gydF4y2Ba
|
拖拽力gydF4y2Ba |
为了确定一个相对的空速,障碍物从CG车辆速度中减去风速。利用相对空速,障碍物决定了阻力。gydF4y2Ba
|
拖的时刻gydF4y2Ba |
利用相对空速,障碍物决定阻力力矩。gydF4y2Ba
|
侧角刚度和松弛动力学gydF4y2Ba
| 描述gydF4y2Ba | 实施gydF4y2Ba |
|---|---|
常量值。gydF4y2Ba |
块使用恒定的刚度值gydF4y2BaCygydF4y2BafgydF4y2Ba和gydF4y2BaCygydF4y2BargydF4y2Ba。gydF4y2Ba |
根据转角刚度数据和滑移角查找表格。gydF4y2Ba |
块使用查找表是角刚度数据和滑移角的函数。gydF4y2Ba
|
根据转角刚度数据和滑移角查找表格。gydF4y2Ba 滑移角度包括松弛长度动态设置。gydF4y2Ba |
块使用查找表是角刚度数据和滑移角的函数。滑移角包括松弛长度动态设置。松弛长度近似于一个有效的转角刚度力,这是一个函数的车轮旅行。gydF4y2Ba
|
方程使用这些变量。gydF4y2Ba
|
车辆重心位移、速度和加速度,沿车辆固定gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
|
车辆重心位移、速度和加速度,沿车辆固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
ψgydF4y2Ba |
车辆固定架绕地球固定转动gydF4y2BaZgydF4y2Ba设在(偏航)gydF4y2Ba |
rgydF4y2Ba,gydF4y2Ba |
车辆角速度,约车辆固定gydF4y2BazgydF4y2Ba设在(偏航率)gydF4y2Ba |
| FgydF4y2BaxfgydF4y2Ba,gydF4y2BaFgydF4y2BaxrgydF4y2Ba | 纵向力施加到前后轮,沿车辆固定gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BayfgydF4y2Ba,gydF4y2BaFgydF4y2Ba年gydF4y2Ba | 横向力施加到前后轮,沿车辆固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BaxextgydF4y2Ba,gydF4y2BaFgydF4y2BayextgydF4y2Ba,gydF4y2BaFgydF4y2Ba泽克斯gydF4y2Ba | 施加在车辆重心上的外力,沿车辆固定gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba相互重合gydF4y2Ba |
| FgydF4y2BadxgydF4y2Ba,gydF4y2BaFgydF4y2BadygydF4y2Ba,gydF4y2BaFgydF4y2BadzgydF4y2Ba | 拖力应用到车辆CG,沿车辆固定gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba相互重合gydF4y2Ba |
| FgydF4y2BaxinputgydF4y2Ba,gydF4y2BaFgydF4y2Ba银币gydF4y2Ba,gydF4y2BaFgydF4y2BazinputgydF4y2Ba | 施加于车辆重心的输入力,沿车辆固定gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba相互重合gydF4y2Ba |
| 米gydF4y2BaxextgydF4y2Ba,gydF4y2Ba米gydF4y2BayextgydF4y2Ba,gydF4y2Ba米gydF4y2Ba泽克斯gydF4y2Ba | 外部力矩关于车辆重心,关于车辆固定gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba相互重合gydF4y2Ba |
| 米gydF4y2BadxgydF4y2Ba,gydF4y2Ba米gydF4y2BadygydF4y2Ba,gydF4y2Ba米gydF4y2BadzgydF4y2Ba | 关于车辆CG,关于车辆固定的阻力矩gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba相互重合gydF4y2Ba |
| 米gydF4y2BaxinputgydF4y2Ba,gydF4y2Ba米gydF4y2Ba银币gydF4y2Ba,gydF4y2Ba米gydF4y2BazinputgydF4y2Ba | 输入关于车辆重心的力矩,关于车辆固定的力矩gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba相互重合gydF4y2Ba |
| 我gydF4y2BazzgydF4y2Ba | 车辆车身绕车辆转动惯量固定gydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BaxftgydF4y2Ba,gydF4y2BaFgydF4y2BaxrtgydF4y2Ba | 纵向轮胎力施加于前后轮,沿车辆固定gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BayftgydF4y2Ba,gydF4y2BaFgydF4y2BayftgydF4y2Ba | 侧向轮胎力施加到前后轮,沿车辆固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BaxflgydF4y2Ba,gydF4y2BaFgydF4y2BaxfrgydF4y2Ba | 纵向力施加于左前轮和右前轮,沿车辆固定gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BayflgydF4y2Ba,gydF4y2BaFgydF4y2BayfrgydF4y2Ba | 施加于前左和前右车轮的侧向力,沿车辆固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BaxrlgydF4y2Ba,gydF4y2BaFgydF4y2BaxrrgydF4y2Ba | 纵向力施加于后左后轮和后右后轮,沿车辆固定gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BayrlgydF4y2Ba,gydF4y2BaFgydF4y2BayrrgydF4y2Ba | 施加于后左后轮和后右后轮的侧向力,沿车辆固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BaxfltgydF4y2Ba,gydF4y2BaFgydF4y2BaxfrtgydF4y2Ba | 纵向轮胎力施加于左前轮和右前轮,沿车辆固定gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BayfltgydF4y2Ba,gydF4y2BaFgydF4y2BayfrtgydF4y2Ba | 轮胎侧向力施加于左前轮和右前轮,沿车辆固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BaxrltgydF4y2Ba,gydF4y2BaFgydF4y2BaxrrtgydF4y2Ba | 纵向轮胎力施加于左后轮和右后轮,沿车辆固定gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BayrltgydF4y2Ba,gydF4y2BaFgydF4y2BayrrtgydF4y2Ba | 施加于后左后轮和后右后轮的侧向力,沿车辆固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| FgydF4y2Ba采埃孚gydF4y2Ba,gydF4y2BaFgydF4y2Ba锆gydF4y2Ba | 施加于前后轮的法向力,沿车辆固定gydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BaznomgydF4y2Ba | 沿固定车辆施加在车轴上的标称法向力gydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BazflgydF4y2Ba,gydF4y2BaFgydF4y2BazfrgydF4y2Ba | 法向力作用于前左右车轮,沿车辆固定gydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| FgydF4y2BazrlgydF4y2Ba,gydF4y2BaFgydF4y2BazrrgydF4y2Ba | 沿车辆方向施加在左后轮和右后轮上的法向力gydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| 米gydF4y2Ba | 车辆身体质量gydF4y2Ba |
| 一个gydF4y2Ba,gydF4y2BabgydF4y2Ba | 分别为前轮和后轮从车辆CG法向投影点到共轴平面的距离gydF4y2Ba |
| hgydF4y2Ba | 车辆重心高于轴平面的高度gydF4y2Ba |
| dgydF4y2Ba | 沿车辆几何中心线到质心的横向距离固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| hhgydF4y2Ba | 悬挂在车轴平面以上的高度,沿车辆固定gydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| dhgydF4y2Ba | 从牵引车CG的法向投影点到共轴平面的纵向距离gydF4y2Ba |
| 霍奇金淋巴瘤gydF4y2Ba | 从质心到悬挂沿车辆的横向距离固定gydF4y2BaygydF4y2Ba设在。gydF4y2Ba |
| αgydF4y2BafgydF4y2Ba,gydF4y2BaαgydF4y2BargydF4y2Ba | 前后轮滑移角gydF4y2Ba |
| αgydF4y2BaflgydF4y2Ba,gydF4y2BaαgydF4y2BafrgydF4y2Ba | 左前轮和右前轮打滑角gydF4y2Ba |
| αgydF4y2BarlgydF4y2Ba,gydF4y2BaαgydF4y2BarrgydF4y2Ba | 后左和右车轮滑角gydF4y2Ba |
| δgydF4y2BafgydF4y2Ba,gydF4y2BaδgydF4y2BargydF4y2Ba | 前后轮转向角度gydF4y2Ba |
| δgydF4y2BarlgydF4y2Ba,gydF4y2BaδgydF4y2BarrgydF4y2Ba | 后左右方向盘转向角度gydF4y2Ba |
| δgydF4y2BaflgydF4y2Ba,gydF4y2BaδgydF4y2BafrgydF4y2Ba | 前左右方向盘转向角度gydF4y2Ba |
| wgydF4y2BafgydF4y2Ba,gydF4y2BawgydF4y2BargydF4y2Ba | 前后履带宽度gydF4y2Ba |
| CygydF4y2BafgydF4y2Ba,gydF4y2BaCygydF4y2BargydF4y2Ba | 前后轮转弯刚度gydF4y2Ba |
| CygydF4y2BafdatagydF4y2Ba,gydF4y2BaCygydF4y2BardatagydF4y2Ba | 前后轮转向刚度数据gydF4y2Ba |
| σgydF4y2BafgydF4y2Ba,gydF4y2BaσgydF4y2BargydF4y2Ba | 前后轮放松长度gydF4y2Ba |
| αgydF4y2BafσgydF4y2Ba,gydF4y2BaαgydF4y2BarσgydF4y2Ba | 前后轮滑移角度,包括放松长度gydF4y2Ba |
| vgydF4y2BawfgydF4y2Ba,gydF4y2BavgydF4y2Ba西铁gydF4y2Ba | 前后轮挂载点速度的大小gydF4y2Ba |
| μgydF4y2BafgydF4y2Ba,gydF4y2BaμgydF4y2BargydF4y2Ba | 前后轮摩擦系数gydF4y2Ba |
| μgydF4y2BaflgydF4y2Ba,gydF4y2BaμgydF4y2BafrgydF4y2Ba | 前、左、右车轮摩擦系数gydF4y2Ba |
| μgydF4y2BarlgydF4y2Ba,gydF4y2BaμgydF4y2BarrgydF4y2Ba | 后轮左右摩擦系数gydF4y2Ba |
| CgydF4y2BadgydF4y2Ba | 空气阻力系数沿车辆作用固定gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
| CgydF4y2Ba年代gydF4y2Ba | 空气阻力系数沿车辆作用固定gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| CgydF4y2BalgydF4y2Ba | 空气阻力系数沿车辆作用固定gydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| CgydF4y2BarmgydF4y2Ba | 空气阻力滚转力矩作用于飞行器gydF4y2BaxgydF4y2Ba设在gydF4y2Ba |
| CgydF4y2Ba点gydF4y2Ba | 空气阻力的俯仰力矩作用于飞行器gydF4y2BaygydF4y2Ba设在gydF4y2Ba |
| CgydF4y2BaymgydF4y2Ba | 空气阻力偏航力矩作用于飞行器gydF4y2BazgydF4y2Ba设在gydF4y2Ba |
| 一个gydF4y2BafgydF4y2Ba | 额区gydF4y2Ba |
| RgydF4y2Ba | 大气比气体常数gydF4y2Ba |
| TgydF4y2Ba | 环境空气温度gydF4y2Ba |
| PgydF4y2Ba腹肌gydF4y2Ba | 环境绝对压力gydF4y2Ba |
| wgydF4y2BaxgydF4y2Ba,gydF4y2BawgydF4y2BaygydF4y2Ba,gydF4y2BawgydF4y2BazgydF4y2Ba | 风速,沿车辆固定gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba相互重合gydF4y2Ba |
| WgydF4y2BaxgydF4y2Ba,gydF4y2BaWgydF4y2BaygydF4y2Ba,gydF4y2BaWgydF4y2BazgydF4y2Ba | 沿惯性方向的风速gydF4y2BaXgydF4y2Ba-,gydF4y2BaYgydF4y2Ba- - - - - -,gydF4y2BaZgydF4y2Ba相互重合gydF4y2Ba |
港口gydF4y2Ba
输入gydF4y2Ba
输出gydF4y2Ba
参数gydF4y2Ba
车辆轨道gydF4y2Ba-履带数量gydF4y2Ba
单(自行车)gydF4y2Ba|gydF4y2Ba双gydF4y2Ba
在车辆动力学块集库中,有两种类型的gydF4y2Ba车辆身体3自由度gydF4y2Ba积木模型纵向,横向和偏航运动。gydF4y2Ba
| 块gydF4y2Ba | 车辆跟踪设置gydF4y2Ba | 实施gydF4y2Ba |
|---|---|---|
单线车体三维模型gydF4y2Ba |
|
|
车身3DOF双轨gydF4y2Ba |
|
力作用于车辆的四个角或gydF4y2Ba硬点gydF4y2Ba。gydF4y2Ba |
轴力gydF4y2Ba-轴力类型gydF4y2Ba
外部纵向速度gydF4y2Ba|gydF4y2Ba纵向外力gydF4y2Ba|gydF4y2Ba外部力量gydF4y2Ba
使用gydF4y2Ba轴力gydF4y2Ba参数指定力的类型。gydF4y2Ba
| 轴力设置gydF4y2Ba | 实施gydF4y2Ba |
|---|---|
|
|
|
|
|
|
前轮转向gydF4y2Ba- - - - - -gydF4y2BaWhlAngFgydF4y2Ba输入端口gydF4y2Ba
在gydF4y2Ba(默认)|gydF4y2Ba从gydF4y2Ba
指定创建输入端口gydF4y2BaWhlAngFgydF4y2Ba。gydF4y2Ba
外部风gydF4y2Ba- - - - - -gydF4y2BaWindXYZgydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2BaWindXYZgydF4y2Ba。gydF4y2Ba
外部力量gydF4y2Ba- - - - - -gydF4y2BaFExtgydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2BaFExtgydF4y2Ba。gydF4y2Ba
外部的时刻gydF4y2Ba- - - - - -gydF4y2Ba下边了gydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2Ba下边了gydF4y2Ba。gydF4y2Ba
后轮转向gydF4y2Ba- - - - - -gydF4y2BaWhlAngRgydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2BaWhlAngRgydF4y2Ba。gydF4y2Ba
外摩擦gydF4y2Ba- - - - - -gydF4y2BaμgydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2BaμgydF4y2Ba。gydF4y2Ba
结力gydF4y2Ba- - - - - -gydF4y2Ba跳频gydF4y2Ba输入端口gydF4y2Ba
在gydF4y2Ba(默认)|gydF4y2Ba从gydF4y2Ba
选择创建输入端口gydF4y2Ba跳频gydF4y2Ba。gydF4y2Ba
挂接时刻gydF4y2Ba- - - - - -gydF4y2BaMhgydF4y2Ba输入端口gydF4y2Ba
在gydF4y2Ba(默认)|gydF4y2Ba从gydF4y2Ba
指定创建输入端口gydF4y2BaMhgydF4y2Ba。gydF4y2Ba
最初的纵向位置gydF4y2Ba- - - - - -gydF4y2BaX_ogydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2BaX_ogydF4y2Ba。gydF4y2Ba
初始横向位置gydF4y2Ba- - - - - -gydF4y2BaY_ogydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2BaY_ogydF4y2Ba。gydF4y2Ba
初始纵向速度gydF4y2Ba- - - - - -gydF4y2Baxdot_ogydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2Baxdot_ogydF4y2Ba。gydF4y2Ba
初始横向速度gydF4y2Ba- - - - - -gydF4y2Baydot_ogydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2Baydot_ogydF4y2Ba。gydF4y2Ba
初始偏航角gydF4y2Ba- - - - - -gydF4y2Bapsi_ogydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2Bapsi_ogydF4y2Ba。gydF4y2Ba
初始偏航率gydF4y2Ba- - - - - -gydF4y2Bar_ogydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2Bar_ogydF4y2Ba。gydF4y2Ba
气温gydF4y2Ba- - - - - -gydF4y2BaAirTempgydF4y2Ba输入端口gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
指定创建输入端口gydF4y2BaAirTempgydF4y2Ba。gydF4y2Ba
前轴上的车轮数,NFgydF4y2Ba-前轮计数gydF4y2Ba
2gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
前轴上的车轮数,gydF4y2BaNgydF4y2BaFgydF4y2Ba。这个值是无量纲的。gydF4y2Ba
后桥车轮数,NRgydF4y2Ba-后轮数gydF4y2Ba
2gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
后桥上的车轮数,gydF4y2BaNgydF4y2BaRgydF4y2Ba。这个值是无量纲的。gydF4y2Ba
车辆质量、米gydF4y2Ba——车辆质量gydF4y2Ba
2000gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
汽车质量,gydF4y2Ba米gydF4y2Ba在公斤。gydF4y2Ba
质心到前轴的纵向距离,agydF4y2Ba-前轴距离gydF4y2Ba
1.4gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
水平距离gydF4y2Ba一个gydF4y2Ba从车辆重心到前轮轴,单位为m。gydF4y2Ba
从质心到后轴的纵向距离,bgydF4y2Ba-后轴距离gydF4y2Ba
1.6gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
水平距离gydF4y2BabgydF4y2Ba从车辆重心到后轮轴,单位是m。gydF4y2Ba
质量中心到轴平面的垂直距离,hgydF4y2Ba-高度gydF4y2Ba
0.35gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
车辆重心高于车轴的高度,gydF4y2BahgydF4y2Ba在m。gydF4y2Ba
从质心到吊钩的纵向距离,dhgydF4y2Ba-从厘米到挂接装置的距离gydF4y2Ba
1gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
从质心到结绳的纵向距离,gydF4y2BadhgydF4y2Ba在m。gydF4y2Ba
依赖关系gydF4y2Ba
要启用该参数,请在gydF4y2Ba输入信号gydF4y2Ba窗格中,选择gydF4y2Ba结力gydF4y2Ba或gydF4y2Ba挂接时刻gydF4y2Ba。gydF4y2Ba
悬挂到轴平面的垂直距离,hhgydF4y2Ba-连接到轴平面的距离gydF4y2Ba
0.2gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
从吊钩到轴平面的垂直距离,gydF4y2BahhgydF4y2Ba在m。gydF4y2Ba
依赖关系gydF4y2Ba
要启用该参数,请在gydF4y2Ba输入信号gydF4y2Ba窗格中,选择gydF4y2Ba结力gydF4y2Ba或gydF4y2Ba挂接时刻gydF4y2Ba。gydF4y2Ba
初始惯性坐标系纵向位置,X_ogydF4y2Ba-位置gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
初始车辆重心位移沿土方固定gydF4y2BaXgydF4y2Ba设在,m。gydF4y2Ba
初始纵向速度,xdot_ogydF4y2Ba——速度gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
沿固定车辆的初始车辆重心速度gydF4y2BaxgydF4y2Ba设在m / s。gydF4y2Ba
依赖关系gydF4y2Ba
对于gydF4y2Ba单线车体三维模型gydF4y2Ba或gydF4y2Ba车身3DOF双轨gydF4y2Ba块,若要启用此参数,请设置gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
纵向外力gydF4y2Ba外部力量gydF4y2Ba
前轮胎角部刚度,Cy\u fgydF4y2Ba——刚度gydF4y2Ba
12e3gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
前胎转角刚度,gydF4y2BaCygydF4y2BafgydF4y2Ba在N / rad。gydF4y2Ba
依赖关系gydF4y2Ba
对于gydF4y2Ba单线车体三维模型gydF4y2Ba或gydF4y2Ba车身3DOF双轨gydF4y2Ba块,以启用此参数:gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
清晰的gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
后轮转角刚度Cy_rgydF4y2Ba——刚度gydF4y2Ba
11 e3gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
后轮转角刚度,gydF4y2BaCygydF4y2BargydF4y2Ba在N / rad。gydF4y2Ba
依赖关系gydF4y2Ba
对于gydF4y2Ba单线车体三维模型gydF4y2Ba或gydF4y2Ba车身3DOF双轨gydF4y2Ba块,以启用此参数:gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
清晰的gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
初始惯性系横向位移,Y_ogydF4y2Ba-位置gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
初始车辆重心位移沿土方固定gydF4y2BaYgydF4y2Ba设在,m。gydF4y2Ba
初始横向速度ydot_ogydF4y2Ba——速度gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
沿固定车辆的初始车辆重心速度gydF4y2BaygydF4y2Ba设在m / s。gydF4y2Ba
映射角刚度gydF4y2Ba-挑选gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
使映射角刚度计算。gydF4y2Ba
依赖关系gydF4y2Ba
要启用该参数,请设置gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
包括松弛长度动力学gydF4y2Ba-启用松弛长度动力学gydF4y2Ba
在gydF4y2Ba(默认)|gydF4y2Ba从gydF4y2Ba
启用松弛长度动态。gydF4y2Ba
依赖关系gydF4y2Ba
启用该参数。gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
清晰的gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
几何中心线到质心的横向距离,dgydF4y2Ba-距离gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
几何中心线到质心的横向距离,gydF4y2BadgydF4y2Ba,单位为m,沿车辆固定gydF4y2BaygydF4y2Ba。正值表示车辆CM在几何中心线的右侧。负值表示车辆CM在几何中心线的左边。gydF4y2Ba
几何中心线到挂接装置的横向距离,hlgydF4y2Ba-距离gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
几何中心线到结的横向距离,gydF4y2Ba霍奇金淋巴瘤gydF4y2Ba,单位为m,沿车辆固定gydF4y2BaygydF4y2Ba。正值表示结在几何中心线的右侧。负值表示结在几何中心线的左边。gydF4y2Ba
依赖关系gydF4y2Ba
要启用该参数,请在gydF4y2Ba输入信号gydF4y2Ba窗格中,选择gydF4y2Ba结力gydF4y2Ba或gydF4y2Ba挂接时刻gydF4y2Ba。gydF4y2Ba
磁道宽度gydF4y2Ba-宽度gydF4y2Ba
[1.4,1.4]gydF4y2Ba(默认)|gydF4y2Ba1gydF4y2Ba——- - - - - -gydF4y2Ba2gydF4y2Ba矢量gydF4y2Ba
轨道宽度,gydF4y2BawgydF4y2Ba在m。gydF4y2Ba
依赖关系gydF4y2Ba
要启用该参数,请设置gydF4y2Ba车辆轨道gydF4y2Ba到gydF4y2Ba双gydF4y2Ba。gydF4y2Ba
前轮胎松弛长度,σfgydF4y2Ba——放松长度gydF4y2Ba
。1gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
前轮松弛长度,gydF4y2BaσgydF4y2BafgydF4y2Ba在m。gydF4y2Ba
依赖关系gydF4y2Ba
启用该参数。gydF4y2Ba
集gydF4y2Ba车辆轨道gydF4y2Ba选择其中一种:gydF4y2Ba
单双轴gydF4y2Ba双重2-axlegydF4y2Ba单一纵然gydF4y2Ba双重纵然gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
请执行以下任一操作:gydF4y2Ba
选择gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
清晰的gydF4y2Ba映射角刚度gydF4y2Ba并选择gydF4y2Ba包括松弛长度动力学gydF4y2Ba。gydF4y2Ba
后轮胎(s)松弛长度,sigma_rgydF4y2Ba——放松长度gydF4y2Ba
。1gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
后轮胎松弛长度,gydF4y2BaσgydF4y2BargydF4y2Ba在m。gydF4y2Ba
依赖关系gydF4y2Ba
启用该参数。gydF4y2Ba
集gydF4y2Ba车辆轨道gydF4y2Ba选择其中一种:gydF4y2Ba
单双轴gydF4y2Ba双重2-axlegydF4y2Ba单一纵然gydF4y2Ba双重纵然gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
请执行以下任一操作:gydF4y2Ba
选择gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
清晰的gydF4y2Ba映射角刚度gydF4y2Ba并选择gydF4y2Ba包括松弛长度动力学gydF4y2Ba。gydF4y2Ba
前轴滑移角断点,alpha_f_brkgydF4y2Ba——断点gydF4y2Ba
(-。1.1]gydF4y2Ba(默认)|gydF4y2Ba矢量gydF4y2Ba
前轴滑移角断点,gydF4y2BaαgydF4y2BafbrkgydF4y2Ba在rad。gydF4y2Ba
依赖关系gydF4y2Ba
启用该参数。gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
选择gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
前轴转角数据,Cy_f_datagydF4y2Ba——断点gydF4y2Ba
(9 e3 9 e3)gydF4y2Ba(默认)|gydF4y2Ba矢量gydF4y2Ba
前轴转角数据,gydF4y2BaCygydF4y2BafdatagydF4y2Ba在N / rad。gydF4y2Ba
依赖关系gydF4y2Ba
启用该参数。gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
选择gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
后桥滑移角断点,alpha_r_brkgydF4y2Ba——断点gydF4y2Ba
(-。1.1]gydF4y2Ba(默认)|gydF4y2Ba矢量gydF4y2Ba
后轴滑移角断点,gydF4y2BaαgydF4y2BarbrkgydF4y2Ba在rad。gydF4y2Ba
依赖关系gydF4y2Ba
启用该参数。gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
选择gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
后桥转角数据,Cy_r_datagydF4y2Ba-资料gydF4y2Ba
(9 e3 9 e3)gydF4y2Ba(默认)|gydF4y2Ba矢量gydF4y2Ba
后桥转角数据,gydF4y2BaCygydF4y2BardatagydF4y2Ba在N / rad。gydF4y2Ba
依赖关系gydF4y2Ba
启用该参数。gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
选择gydF4y2Ba映射角刚度gydF4y2Ba。gydF4y2Ba
偏航极惯性,伊兹gydF4y2Ba——惯性gydF4y2Ba
4000gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
偏航极惯性,单位为kg*m^2。gydF4y2Ba
初始偏航角psi_ogydF4y2Ba——Psi旋转gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
车辆固定框架绕固定地球的旋转gydF4y2BaZgydF4y2Ba-轴(偏航),单位为rad。gydF4y2Ba
初始横摆角速度gydF4y2Ba- - - - - -偏航率gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
车辆绕车辆的角速度固定gydF4y2BazgydF4y2Ba-轴(偏航率),单位为rad/s。gydF4y2Ba
纵向阻力面积,AfgydF4y2Ba-有效车辆横截面积gydF4y2Ba
2gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
有效车辆横截面积,gydF4y2Ba一个gydF4y2BafgydF4y2Ba,计算飞行器所受空气动力阻力,单位为mgydF4y2Ba2gydF4y2Ba。gydF4y2Ba
纵向阻力系数,CdgydF4y2Ba-空气阻力系数gydF4y2Ba
。3(默认)|gydF4y2Ba标量gydF4y2Ba
空气阻力系数,gydF4y2BaCgydF4y2BadgydF4y2Ba。这个值是无量纲的。gydF4y2Ba
纵向升力系数,ClgydF4y2Ba-空气升力系数gydF4y2Ba
。1gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
气举系数,gydF4y2BaCgydF4y2BalgydF4y2Ba。这个值是无量纲的。gydF4y2Ba
纵向阻力螺距矩,CpmgydF4y2Ba球拖gydF4y2Ba
。1gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
纵向阻力螺距力矩系数,gydF4y2BaCgydF4y2Ba点gydF4y2Ba。这个值是无量纲的。gydF4y2Ba
相对风角矢量,βwgydF4y2Ba-风向角gydF4y2Ba
(0:0.01:0.3)gydF4y2Ba(默认)|gydF4y2Ba矢量gydF4y2Ba
相对风角矢量,gydF4y2BaβgydF4y2BawgydF4y2Ba在rad。gydF4y2Ba
侧力系数向量,cgydF4y2Ba-侧力系数gydF4y2Ba
[0:0.03:0.9]gydF4y2Ba(默认)|gydF4y2Ba矢量gydF4y2Ba
侧力系数矢量系数,gydF4y2BaCgydF4y2Ba年代gydF4y2Ba。这个值是无量纲的。gydF4y2Ba
偏航力矩系数矢量,CymgydF4y2Ba-偏航力矩阻力gydF4y2Ba
(0:0.01:0.3)gydF4y2Ba(默认)|gydF4y2Ba矢量gydF4y2Ba
偏航力矩系数矢量系数,gydF4y2BaCgydF4y2BaymgydF4y2Ba。这个值是无量纲的。gydF4y2Ba
绝对气压,巴布斯gydF4y2Ba——压力gydF4y2Ba
101325gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba|gydF4y2Ba标量gydF4y2Ba
环境绝对压力,gydF4y2BaPgydF4y2Ba腹肌gydF4y2BaPa。gydF4y2Ba
气温gydF4y2Ba——温度gydF4y2Ba
273gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
环境绝对温度,gydF4y2BaTgydF4y2Ba在K。gydF4y2Ba
依赖关系gydF4y2Ba
要启用该参数,请清除gydF4y2Ba气温gydF4y2Ba。gydF4y2Ba
重力加速度ggydF4y2Ba——重力gydF4y2Ba
9.81gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
重力加速度,gydF4y2BaggydF4y2Ba在m / s ^ 2。gydF4y2Ba
标称摩擦比例因子,μgydF4y2Ba-摩擦比例系数gydF4y2Ba
1gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
公称摩擦因数,gydF4y2BaμgydF4y2Ba。这个值是无量纲的。gydF4y2Ba
依赖关系gydF4y2Ba
对于gydF4y2Ba单线车体三维模型gydF4y2Ba或gydF4y2Ba车身3DOF双轨gydF4y2Ba块,以启用此参数:gydF4y2Ba
集gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
清晰的gydF4y2Ba外摩擦gydF4y2Ba。gydF4y2Ba
纵向速度公差,xdot_tolgydF4y2Ba——宽容gydF4y2Ba
. 01gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
纵向速度公差,单位为米/秒。gydF4y2Ba
名义法向力,FznomgydF4y2Ba-法向力gydF4y2Ba
5000gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
标称法向力,单位为N。gydF4y2Ba
依赖关系gydF4y2Ba
对于gydF4y2Ba单线车体三维模型gydF4y2Ba或gydF4y2Ba车身3DOF双轨gydF4y2Ba块,若要启用此参数,请设置gydF4y2Ba轴力gydF4y2Ba选择其中一种:gydF4y2Ba
外部纵向速度gydF4y2Ba纵向外力gydF4y2Ba
几何纵向偏移从轴平面,长gydF4y2Ba——纵向偏移量gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
车辆底盘沿车身从车轴平面偏移gydF4y2BaxgydF4y2Ba当您使用3D可视化引擎时,考虑使用偏移量来定位独立于车辆CG的底盘。gydF4y2Ba
几何侧向偏移距中心平面,latOffgydF4y2Ba-横向偏移gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
车辆底盘沿车身从中心平面偏移gydF4y2BaygydF4y2Ba当您使用3D可视化引擎时,考虑使用偏移量来定位独立于车辆CG的底盘。gydF4y2Ba
几何垂直偏移从轴平面,vertOffgydF4y2Ba- - - - - -垂直偏移量gydF4y2Ba
0gydF4y2Ba(默认)|gydF4y2Ba标量gydF4y2Ba
车辆底盘沿车身从车轴平面偏移gydF4y2BazgydF4y2Ba当您使用3D可视化引擎时,考虑使用偏移量来定位独立于车辆CG的底盘。gydF4y2Ba
包络欧拉角gydF4y2Ba-挑选gydF4y2Ba
从gydF4y2Ba(默认)|gydF4y2Ba在gydF4y2Ba
将欧拉角代入区间gydF4y2Ba(π-π,)gydF4y2Ba。对于车辆机动,可能会经历车辆偏航旋转的时间间隔以外,如果你想,考虑取消选择参数:gydF4y2Ba
跟踪车辆的总偏航旋转。gydF4y2Ba
避免车辆状态估计的不连续。gydF4y2Ba
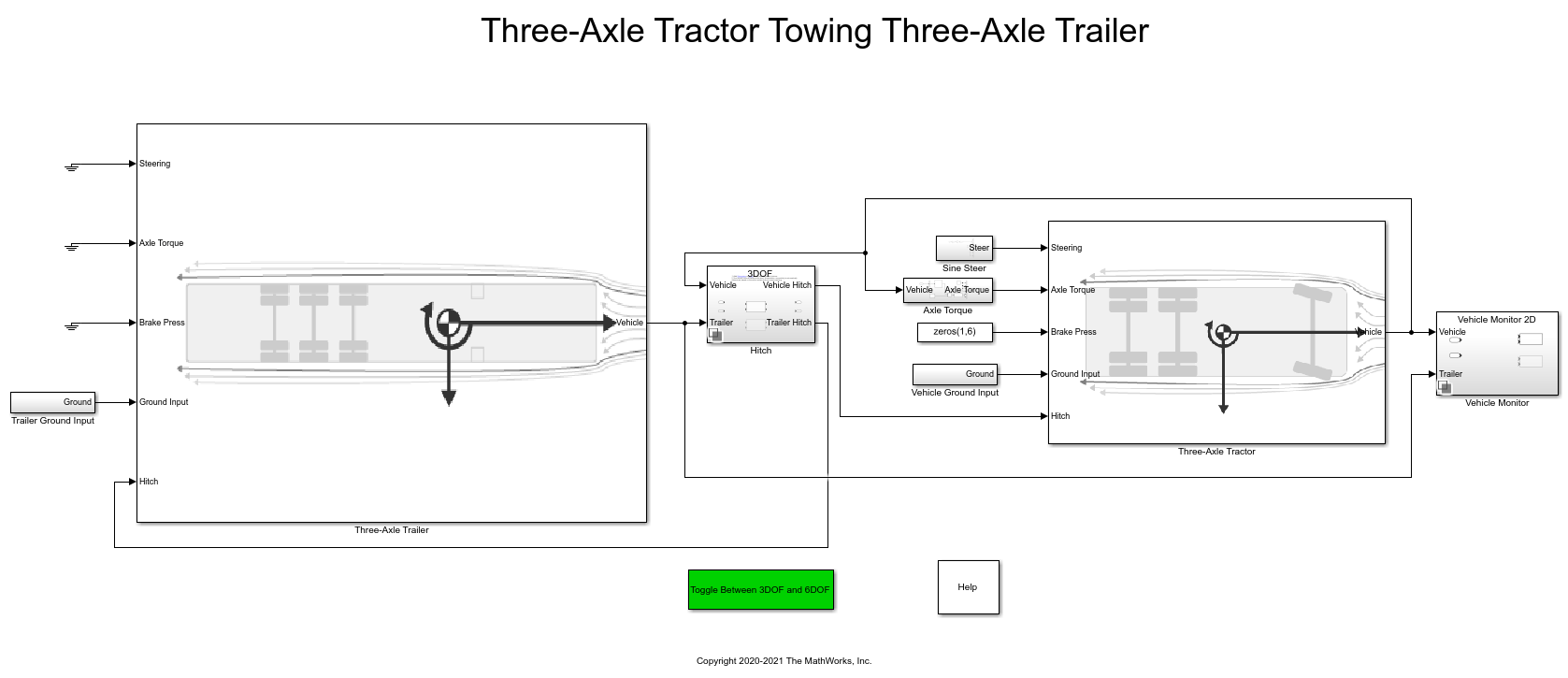
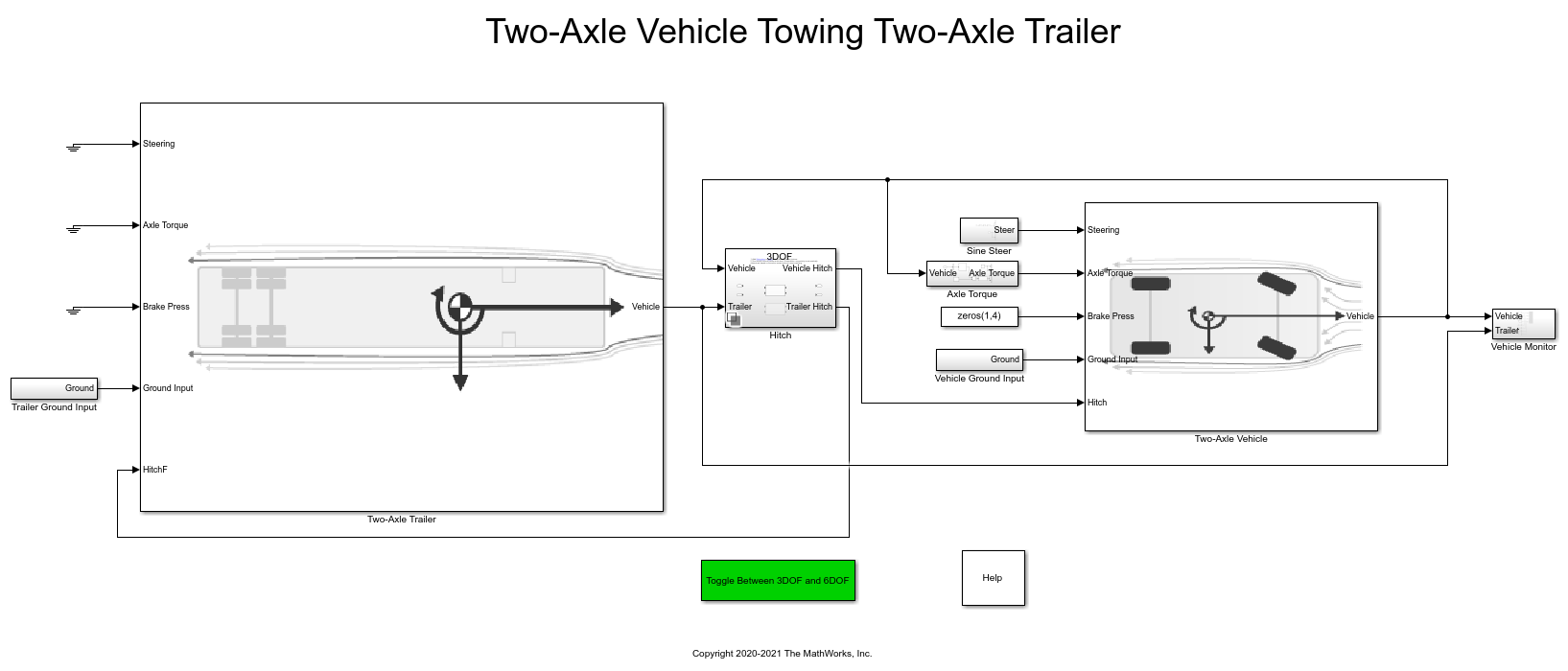
范例gydF4y2Ba
参考文献gydF4y2Ba
[1] Gillespie,托马斯。gydF4y2Ba车辆动力学基础gydF4y2Ba。Warrendale, PA:汽车工程师协会(SAE), 1992。gydF4y2Ba
扩展能力gydF4y2Ba
选择网站gydF4y2Ba
选择一个网站以获取翻译后的内容(如果可用),并查看本地活动和优惠。根据您的位置,我们建议您选择:gydF4y2Ba。gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba你也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba