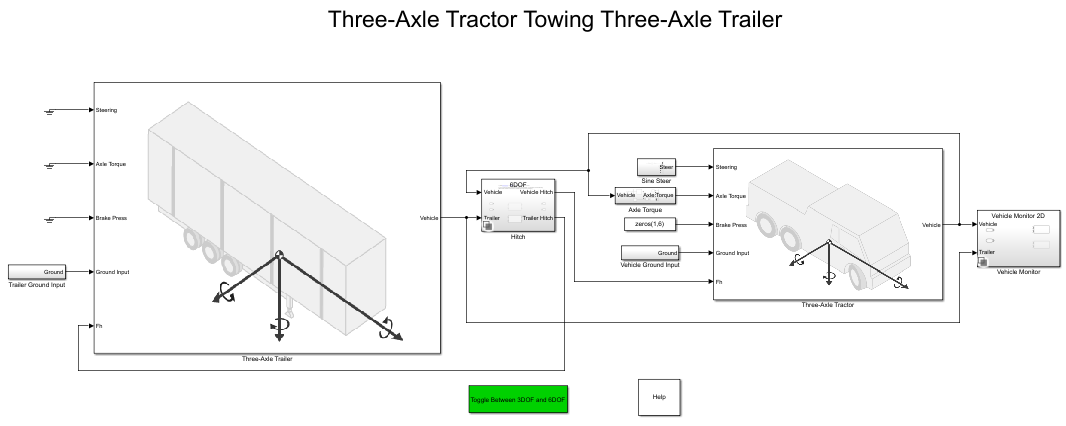
三轴拖拉机拖着一辆三轴拖车
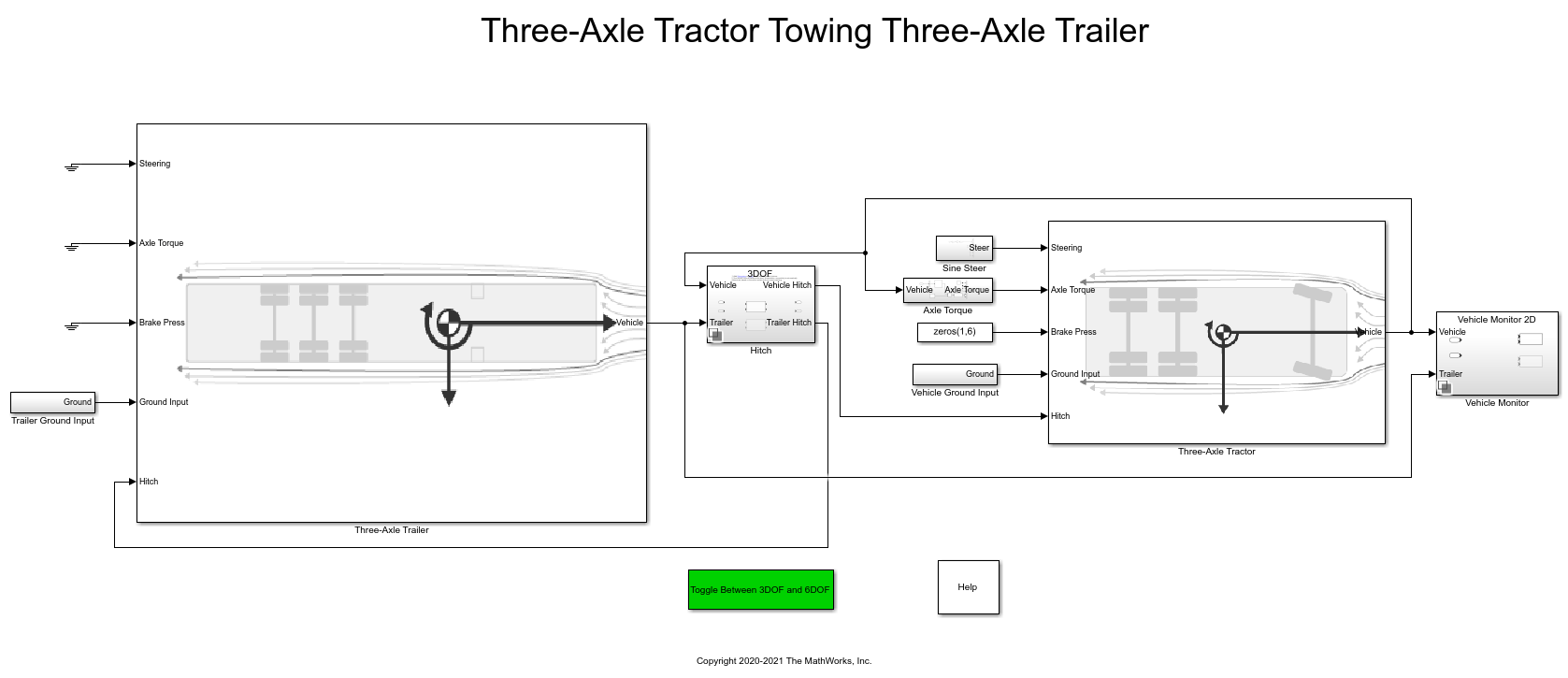
这个例子展示了如何使用三自由度(DOF)绞车牵引三轴拖车和三轴拖拉机。为了引导和驱动拖拉机,该模型使用了正弦波转向输入和后轮施加的轴扭矩。
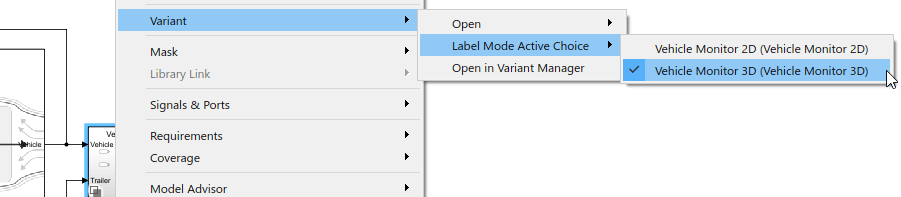
要在3D可视化环境中查看仿真,请使用车辆监视器3D变体。右键单击车辆监视器块并选择变体>标签模式主动选择>车辆监控3 d.看到在三维可视化环境中运行仿真.
为了实现牵引车和拖车,默认情况下,三自由度模型使用了车身3DOF和拖车车身3DOF块。你可以使用在3DOF和6DOF之间切换按钮来配置六自由度模型,该模型使用车身六自由度模块、拖车车身六自由度模块和一个六自由度悬挂子系统。看到六自由度模型.
模型
运行仿真
在模拟选项卡上,单击运行.随着模拟的运行,车辆位置窗口提供了拖拉机和拖车的轨迹。

三轴拖拉机子系统
为了转向和驱动拖拉机,三轴拖拉机子系统使用正弦波转向输入和后轮施加的轴扭矩。该子系统包括车轮、悬架和车身模型。
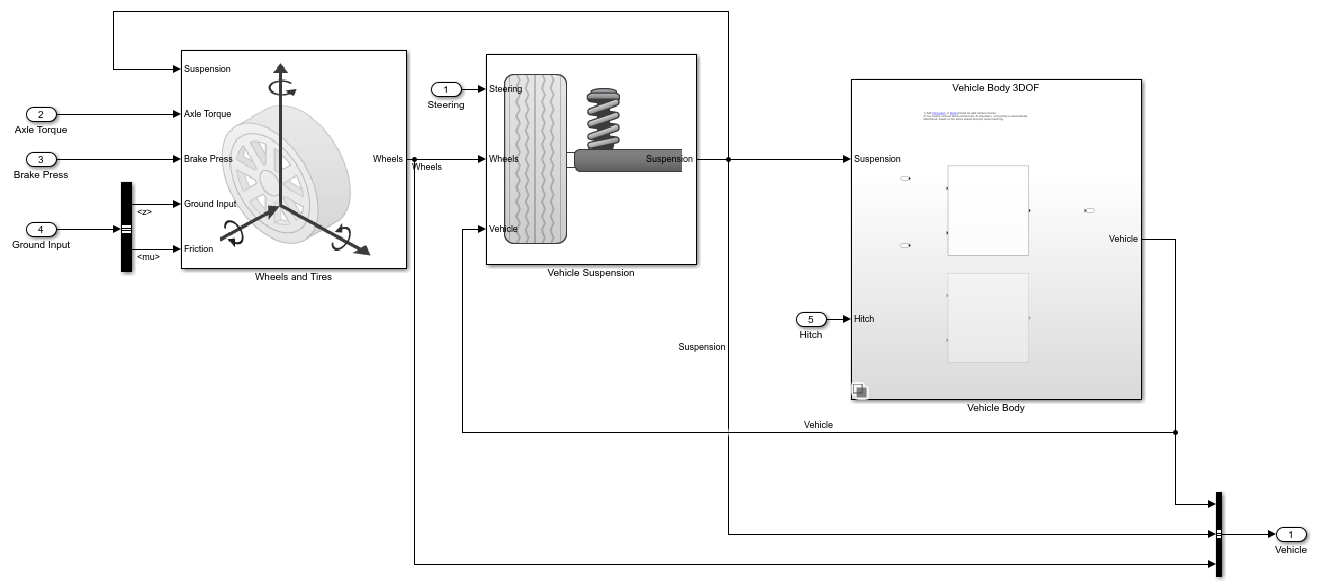
三轴拖车子系统
三轴拖车子系统包括车轮、悬架和拖车车身的模型。

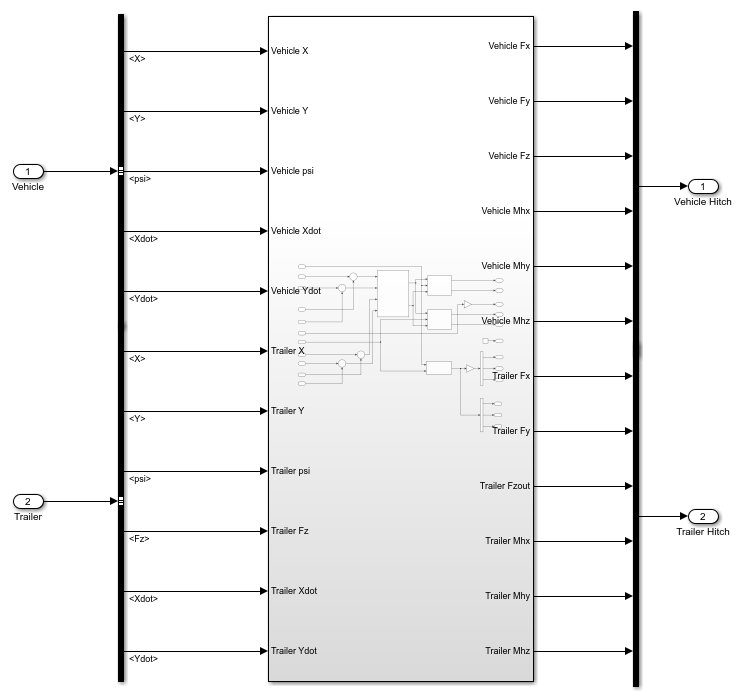
结子系统
当你选择三自由度模型变体时,悬挂模型允许拖拉机和拖车之间的相对纵向、横向和偏航运动。为了限制悬挂系统的纵向和横向运动,在悬挂系统中采用了刚性平动弹簧阻尼器xy车载固定参照系平面。由此产生的弹簧-阻尼力将牵引车和挂车之间的相对运动限制为绕悬挂连接点的垂直轴偏航。悬挂模型将垂直悬挂力从拖车转移到拖拉机上。
当你选择六自由度模型变体时,悬挂模型允许拖拉机和拖车之间的相对纵向、横向、垂直和偏航运动。悬挂模型实现了另一个平移弹簧阻尼器沿z-轴的车辆固定参照系。由相对旋转引起的悬挂力矩的影响可以忽略不计。
弹簧力是惯性参考系中从拖拉机悬挂位置到第一辆拖车前悬挂位置的平面距离的线性函数。
阻尼力是惯性参考系中从拖拉机悬挂位置到第一辆拖车前悬挂位置的平面速度的线性函数。
在三维可视化环境中运行仿真
在车辆监控子系统中,使用车辆监控3D变体将牵引车和拖车在3D仿真环境中可视化。
右键单击车辆监视器块并选择变体>标签模式主动选择>车辆监控3 d.
2.点击运行.在AutoVrtlEnv窗口,在三维可视化环境中查看牵引车和拖车。您可以使用关键数字来改变拖拉机和拖车的摄像机视图。例如,按7查看前左摄像头视图。

六自由度模型
要实现一个6自由度拖拉机,拖车和悬挂模型,点击在3DOF和6DOF之间切换.然后,在模拟选项卡上,单击运行.
要在3D可视化环境中查看仿真,请使用车辆监视器3D变体。
另请参阅
拖车身体3自由度|预告片体六自由度|车辆身体3自由度|车身6自由度
相关的话题
你也可以从以下列表中选择一个网站: