多元小波去噪
本示例的目的是展示小波工具箱™中提供的多元去噪特性。
多变量小波去噪问题处理的模型的形式
在观察X是p维,F是要恢复的确定信号,以及e是一个空间相关的噪声信号。此示例使用多个噪声信号,并执行以下步骤对确定性信号进行去噪。
加载多变量信号
要加载多变量信号,请在MATLAB®提示符下键入以下代码:
负载ex4mwden谁
名称大小字节类属性covar 4x4 128 double x 1024x4 32768 double x_orig 1024x4 32768 double
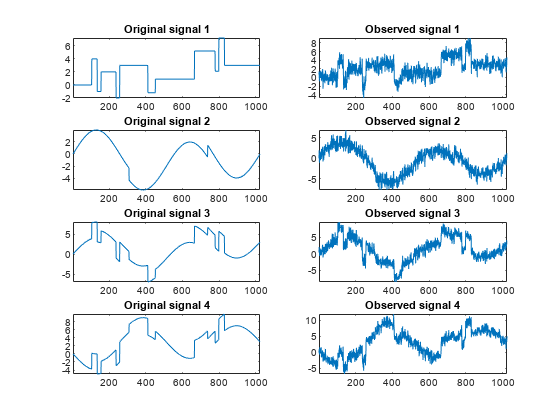
通常,只有矩阵的数据x是可用的。这里,我们还有真噪声协方差矩阵柯伐合金原始信号呢x_orig.这些信号是两个原始信号简单组合的噪声版本。第一个信号是“Blocks”,它是不规则的,第二个信号是“heavyysine”,它是规则的,除了时间750左右。另外两个信号分别是两个原始信号的和和差。在得到的四个信号中加入表现出强空间相关性的多变量高斯白噪声,产生了存储的观测数据x.
显示原始信号和观测信号
显示原始信号和观测信号,类型:
kp=0;为i=1:4子地块(4,2,kp+1),地块(x_orig(:,i));轴紧的;标题([原始信号的num2str(我)])次要情节(4,2,kp + 2),图(x (:, i));轴紧的;标题([“观测信号”,num2str(i)])kp=kp+2;结束
真实噪声协方差矩阵为:
柯伐合金
科瓦尔=4×41.0000 0.8000 0.6000 0.7000 0.8000 1.0000 0.5000 0.6000 0.6000 0.5000 1.0000 0.7000 0.7000 0.6000 0.7000 1.0000
用简单的多元阈值去除噪声
该去噪策略将单变量小波去噪结合在一起,其中估计的噪声协方差矩阵与小波域中近似的非中心主成分分析(PCA)或最终PCA是对角的。
首先,通过键入以下行来设置去噪参数,执行单变量去噪:
水平= 5;wname =“sym4”;tptr =“sqtwolog”;sorh =“年代”;
然后,保留所有主成分,设置主成分参数:
npc_app = 4;npc_fin = 4;
最后,通过输入进行多元去噪:
X_den = wmulden(x, level, wname, npc_app, npc_fin, tptr, sorh);
显示原始信号和去噪信号
要显示原始信号和去噪信号,请键入以下内容:
CLF KP = 0;为I = 1:4 subplot(4,3,kp+1), plot(x_orig(:, I));轴紧的;标题([原始信号的子地块(4,3,kp+2),地块(x(:,i));轴紧的;标题([“观测信号”,num2str(i)])子地块(4,3,kp+3),地块(x_den(:,i));轴线紧的;标题([的去噪信号,num2str(i)])kp=kp+3;结束

通过保留更少的主成分来改进第一个结果
我们可以看到,总的来说,结果是令人满意的。专注于第一个信号,注意它们是正确的恢复,但我们可以通过利用信号之间的关系来改善结果,导致额外的去噪效果。
要使用Kaiser规则自动选择保留主成分的数量,该规则保留与超过所有特征值平均值的特征值相关的成分,请键入:
npc_应用程序=“凯斯”;npc_fin =“凯斯”;
再次执行多元去噪,输入:
[x_den, npc, nestco] = wmulden(x, level, wname, npc_app,)...npc_fin、tptr sorh);
显示保留主成分的数量
第二个输出参数全国人大是保留主成分的数量,用于近似和最终的主成分。
全国人大
人大=1×22 2
正如预期的那样,由于信号是两个原始信号的组合,凯撒规则自动检测到只有两个主成分是感兴趣的。
显示估计的噪声协方差矩阵
第三个输出参数雀巢公司包含估计的噪声协方差矩阵:
雀巢公司
雀巢公司=4×41.0784 0.8333 0.6878 0.8141 0.8333 1.0025 0.5275 0.6814 0.6878 0.5275 1.0501 0.7734 0.8141 0.6814 0.7734 1.0967
通过与前面给出的真矩阵协方差比较,可以看出估计是满意的。
显示原始和最终去噪信号
显示原始和最终去噪信号类型:
kp=0;为I = 1:4 subplot(4,3,kp+1), plot(x_orig(:, I));轴紧的;标题([原始信号的子地块(4,3,kp+2),地块(x(:,i));轴紧的;标题([“观测信号”,num2str(i)])子地块(4,3,kp+3),地块(x_den(:,i));轴线紧的;标题([的去噪信号,num2str(i)])kp=kp+3;结束
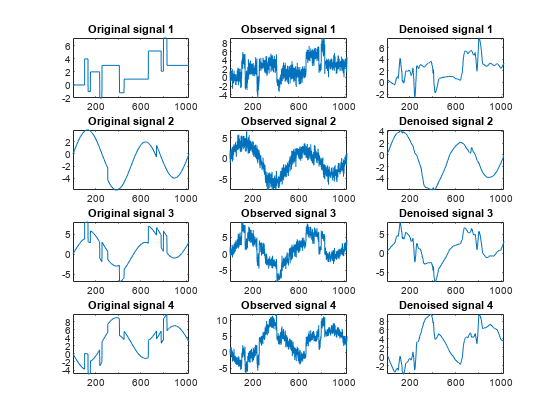
这些结果比以前得到的结果要好。第一个信号是不规则的,经过第二阶段PCA处理后仍然可以正确地恢复,而第二个信号是更规则的,去噪效果更好。
学习更多关于多元去噪的知识
您可以在以下参考资料中找到有关多变量去噪的更多信息,包括一些理论、模拟和实际示例:
M.Aminghafari,N.Cheze和J-M.Poggi(2006),“使用小波和主成分分析的多元去噪”,计算统计与数据分析,50,第2381-2398页。
您还可以从以下列表中选择网站: