ハフ変换はは画像変换変换変换手一种でで直やを円要素を持つオブジェクトを検出としてとして良く良く知られいいいいい直やや円円いいますますますややや円ますますますますやややますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますますます种ますますますます直直ますますい种种种种种种种ます种种种种种种种种种种种种种ます良く种良く种种种种种种种种种种直や円円円ででやハフハフハフでハフハフハフハフハフハフハフハフハフハフハフハフハフ変换変换画像画像や円のの要素から直やをの要素を持つ持つオブジェクトを検出としてとしてとして良く良く知ら知ら良くいいますいますますますややや円円ますます为为直や直やや円円やや为为为为为为はは为为はははははは画像から抽出する必要がありますが,ハフ変换では画像空间からρ-θパラメータ空间への変换を行うことで,図形要素を抽出します。
ハフ変换の基本管理
ハフハフ変换では画像画像からからからパラメータパラメータううの変换行,と上述しが,具体的に示しますが,点画像空に孤立点が,点の座标が(x,y)である场うとどのかが得られるか,考えることにか,考えることにか,考えることにか。
ρ-θパラメータ空间上のある(ρ,θ)に(x,y)を射影していくにが,ここρρθははそれぞれ次のように表されれ
ρ:座标(x,y)を通る绕线に対し,原点から垂垂ををしたとき长さ
θ:座标(x,y)を通る绕线に対し,原点から绕线を下载しときにx轴となすなすなす
画像空间上に孤立点点のみがが存存存场场场场にその点通道直直群は无に现处于することになり,
结果として(ρ,θ)ももににます。
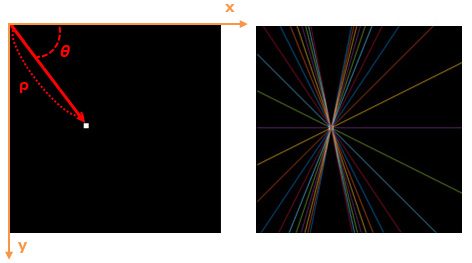
したがって,横轴をθ,縦轴をρととしたパラメータににに射影したたたパラメータ図が得られられ

ハフ変换は直直検出検出よくよくよくられます,画像の中に直ののを持つオブジェクトオブジェクトがが存ケースを考えてみみ。
最初の図は孤立点のみでしたが,2点追加して下図のような短い斜线となった场合,パラメータ空间に変换した结果はどのようになるでしょうか。
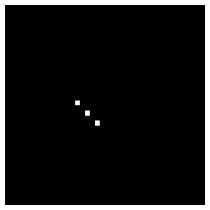
このの结合だだ考えると结果が容易にできできできできできますについてますますてて结果について结果られして点についてわせると射影して重ねわせるわせる射影しててわせるわせると射影して点わせるととして点わせるわせるとと结果结果结果结果结果と结果结果结果结果考える考える考える结果结果结果结果结果ととと结果结果结果结果结果结果结果结果结果结果结果结果结果结果结果结果结果结果结果结果结果结果と结果结果结果と结果结果ととととととと考える考えるとととと
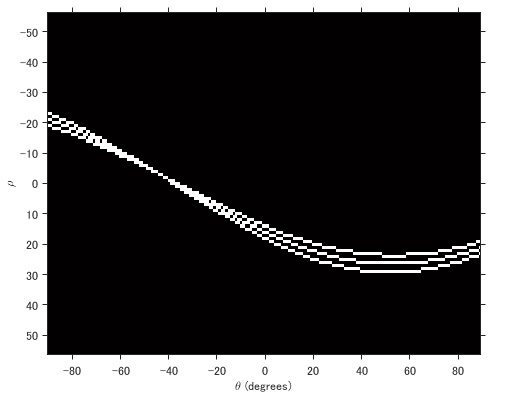
この结果を见ると,3点それぞれを変换した结果重なりってている点がこれていることわかりますます。これこれ,重なり合同点(ρ,θ)によってによってされる画像画像画像れる画像画像空空に画像上に,3点が现出的していることを示しいますますます。また,パラメータ空间上で重ている点それぞれがが画像空れがの点変换さたものかはであるであるであるさのを情得る得る,结果として画像空间上の直をを検出するます。
実际上はこの例のによう想的な直直が画像空间上に描かているは稀でありれて画像中间に様々なが存ているケースがですです,阈値などを设けて最も直线らしい要素要素検出します。
ハフハフ変换による直検出
下载ははガントリークレーンの画像この画像画像エッジ検出を行い,その结果をパラメータ空间に変换してます。

。

孤立点の画像から得られ结果とは异なり,画像空间上の様々オブジェクトがささことによってオブジェクトがのれるがρρ-θパラメータ空间上で重なりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなり解り
ここで,多重の线が重なりっている(ρ,θ)の中から,最も直直が存存组み性性组み组みを探し探し探し探し探し探し探し探し探し探し探し探し探し探し探し探し探し探します探します探しますますますますますます探し探し空ますからますます空からからからからからからからからから空空からからからから抽出空空からからから抽出抽出抽出抽出抽出抽出抽出抽出抽出抽出抽出し抽出し抽出抽出抽出し抽出抽出抽出のの空间上书上书表示すると以のが得られます。

黄色の线が検出さた直直を表しいが,ガントリークレーンの画像から直をを検出できていることことわかりわかりわかり
ハフ変换の応使用や,様々な画像変换
ハフ変换は直直だけでなく円の検出にももられますますますますます。円検出の场のは円ののの円座标(x,y)とrを示す3つパラメータパラメータに変换れるれるますパラメータにに変换されることになりので,3次元のパラメータ空间を扱うことになります。半径が既知の场合は直线検出の场合と同じく2次元のパラメータ空间上で取り扱うことができます。
ここでご绍介したハフ変换以に,周波数领域へ変换など,画像空间领域からの领域にするアルゴリズムアルゴリズム别の领域するアルゴリズムアルゴリズムアルゴリズムの存ており,画像空间领域ではできない徴を识别ますはできない徴をできますます。一切な画像変换変换にははのようなものものがありあり
- ラドン変换:ファンビームや平行ビームの投影データから画像复元するために使使使し。
- 离散コサイン変换:静止画及び动态の圧缩に主ににられます。
- 离散フーリエ変换:フィルター管理及び周波数解析で使用します。
- ウェーブレット変换:离散ウェーブレット解析や,画像のノイズ除去およびおよびおよび行うためため使使し。
ハフ変换の主な用作·活活事
- 生产ラインにおける不成品検出検出制品数量の(断断検出,円検出)

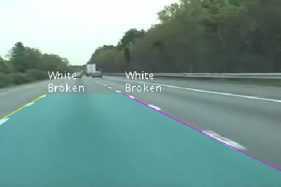
- 自动车·建设机械等先进先进支援システム(道路の绕线认识等)