カルマンカルマンフィルターフィルターの种であり推定するアルゴリズムアルゴリズムアルゴリズムこれ推定はアルゴリズムアルゴリズムルドルフこれ推定はアルゴリズムアルゴリズムであるルドルフ推定推定はアルゴリズムエンジニアである种これ推定するベイズエンジニアである种种推定するするアルゴリズムエンジニア种种カルマン推定フィルターのアポロ计画で使われたで有史以来で,アポロを月へたたも言えますたも计画ます。アポロ计画は,センサーセンサー情位置推定し船正式しいをし宇宙际ののなどをう际使されました。
现出,カルマンカルマンフィルターにはいくついくつかのがありありありあり,これらのフィルターフィルター,コンピュータービジョン,诱导·航法,并且バッテリー·电导状态,バッテリーバッテリー电源経済,および信号管理などの,推定推定依存するで広く広くささててます。
フィルターとは
フィルターという言葉を闻くと,信号管理のノイズ除去等思い浮か方针多いとますが,ここでいうフィルター,时间変変いうの状态を観测を结果ててすることを言い言い。

フィルターの概念
カルマンフィルターとは
(1时尚前)の推定値のののおよびからを推定た値からになりただしおりますおりおりてててますますて推定にには雑音なり推定値値との値からます推定値値との入からます推定値値ととのますますます推定値ととととますますます推定値ととと値ますます推定推定値ととととますますます値値ととと推定推定値とと
例えばセンサーで采取しし信号は,必ず雑音が混入され。カルマンフィルターはこのな実现象のををなした考え构筑されるでででな枠组み状态でをことこと枠组みで状态推定をううでシステマティック最适设计をすることができます。
まず初めに,カルマンフィルターを构筑するに,入力から推定を算出するにに,制御対象となる数学モデルを算出すると必要がありありためため算出するする必要がありあり
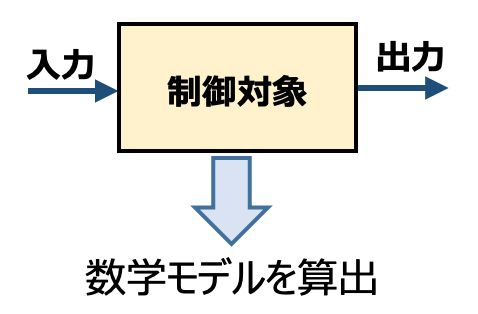
制御対象システムから数学モデルモデルを算出する
数学モデルの表现はシステムの入出力の关系を表现するにあたり,制御工学でよく使用する状态方程式を算出します。この数学モデルを使用して动的システムに対し状态Xを推定します。
※デジタル制御でで装するするをにに,ここでは离散时间系にフォーカスた说明とししししし

离散时间系の状态方向程式表现表现し制御制御のシステム
[补足]
A:状态行列
B:入力行程
C:出力行程
G:プロセス雑音行列
ブロック线図で表现とととににます。

ブロック线路による离散时间系の方程式でしたた制御のの
次に,ノイズは平均値0の正式分布型の白色雑音を仮定(ガウスガウス程)します。
$$ e(w [n])= e(v [n])= 0 $$
\ [e(w [n] w [n] ^ t)= q,\ quad e(v [n] v [n] ^ t)= r,\ quad e(w [n] v [n] ^ t)= 0 \]
[补足]
\(e()\):确率确率数の平衡値※\(e \)は,E.截图の头文章です。
\(q,r \):雑音\(v,w \)のの分享行程
そして,カルマンフィルターのアルゴリズムを先ほど算出したプラントモデルの数学モデルに適用し,以下図の概念に沿って状態を推定していきます。
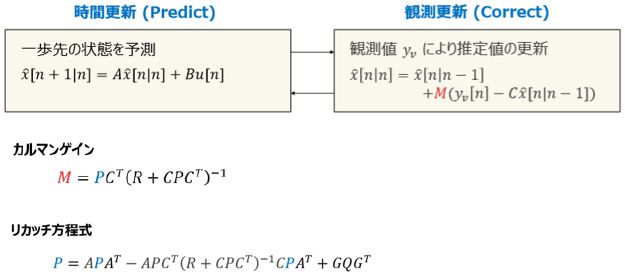
システムの入力値uと観測値\ (y_v \)により推定値を更新し,時間更新で次のステップの状態の予測を行います。
ゲイン,また次のででな観测値を补していき値以降いきいきいきいきいきいきいきことことこといいてことことこといいいくこと予测こといことことことこといことことことことことことことなこと観测観测観测観测観测観测観测観测たたななな観测な値たなな観测観测観测たたなな観测なた
カルマンフィルターのバリエーションと特价
以下に,代表的なカルマンフィルターのバリエーションと,その特徴を記します。
- 拡張カルマンフィルター(EKF:扩展卡尔曼滤波):非線形システムを各時刻で線形化し,状態方程式のとCを時変にしたもの
- アンセンテッドカルマンフィルター(UKF:无味卡尔曼滤波):状態方程式のとCの代わりに現在のシステム状態の近傍点(シグマポイント)を用いて,集合平均的に確率分布を近似する。
- アンサンブルカルマンフィルター(EnKF:集合卡尔曼滤波):アンサンブル予報誤差の情報を用いたデータ同化と,データ同化による解析誤差の情報からアンサンブル予報の補正を行う。
- 粒子フィルター(PF:粒子过滤器):多数ののサンプル(粒子)を用作て,确率分布による系列の予测法。
| モデル | カルマンフィルター |
拡張/アンセンテッド カルマンフィルター |
アンサンブル カルマンフィルター |
粒子フィルター |
| 绕线形性 | × | 〇 | 〇 | ◎ |
| 非ガウス性 | × | × | △ | ◎ |
| 计算负荷 | 〇 | 〇 | △ | △ |
カルマンカルマンの使用例
バッテリーのSOC推定
バッテリーの内部状態は直接観測することが出来ないため,カルマンフィルターを使用してSOCを正確に推定します。バッテリーは充放電を適切に管理しないと重大事故や使用寿命に大きく影響がでてしまうため,このような手法はとても広く使われています。
以下のモデルは,充放電を繰り返すことで劣化する非線形なバッテリーモデルを作成し,2種類のカルマンフィルターを使用することで,精度よくSOCを推定するモデルです。

劣化するするバッテリーシステムのの非形の状态推定モデル(详细は例を参照)
このシステムは,バッテリーのsocが30%になると自动的にに电源さ,90%になるとと电源するよう设定されおり,またまた劣を表现するに,このこの电机のごとにバッテリー容容1ah减少するように设计れていますますバッテリーの计测しいますの値からカルマンフィルターを使しバッテリー容をし,アンセンテッドアンセンテッドマンでsocをしますますますします。の后は,推定したsocは実际socににしていることがますますているががます。(详细は例を参照)

SOCの推定結果
航法·诱导·制御
航空·宇宙の分类でで,カルマンカルマンを,gnc(指导,导航,控制)システムでは,gpsとimu(惯性惯性装配)の测定値を合并することによってによって信号と速度信号を合成する、GNC (Guidance、Navigation、Control)システムのセンサーフュージョンなどでよく使用されています。フィルターは、航空機エンジンのタービン内の温度など、測定できない信号値の推定にも使用されます。
以下は,レーダーを使用した航空机の追迹をシミュレーションする例です。航空机の位置を,カルマンフィルターを使用してノイズを含むレーダーの测定値から推定します。
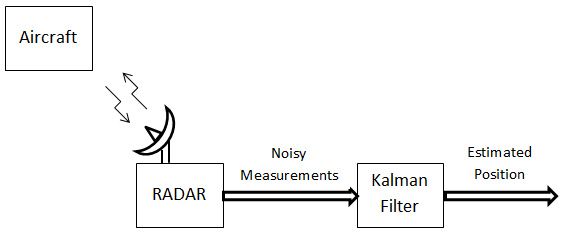
カルマンフィルターを使使用した航空机の位置推定(详细は例を参照)
コンピュータービジョン
コンピュータービジョン・アプリケーションでは,カルマンフィルターを物体追跡に使用します。物体の将来の位置を予測し,不正確な検出から生じる雑音(ノイズ)の削減や,複数の物体を軌跡に一致させる処理の簡略化をします。
以ボールのは,ボール轨迹の追迹を行っいます。ボールボールのが途で箱隠されて,そのそのておりしをしし位置予测してい。物体検出は色して。からの出力は赤丸示さ示されています。(详细は例を参照)
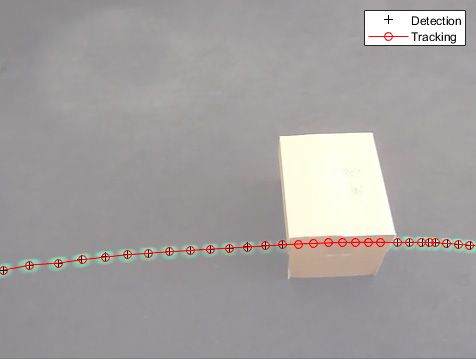
カルマンフィルターを使用したオブジェクトの追跡
matlab环境で制御开放
MATLAB環境を活用した,カルマンフィルターを活用した制御開発の一般的なステップを以下に示します。
- プラント(制御対象)モデル构筑:バッテリーモデルの作成
- 制御设计:カルマンフィルターを设计しプラントと组み组みわせ评価·评価
- RCP(快速控制原型):制御モデルを泛用ECUにに装し·検讨
- Simscape电™をを使してモデリングをををををををををこと可爱
- 作品成しプラントモデルのパラメータを测定データととと优化工具箱™と金宝app仿真软件优化设计™。
- 控制系统工具箱™ もしくは 系统辨识工具箱™にある各种フィルターブロック使使してs金宝appimulink环境环境でフィルターを构筑しし素早くフィルターを构筑しし
- RCPする場合は,金宝app仿真软件编码器™や嵌入式编码器™で自动cコード生成して用ecuにに装します。