。
设定値追従と外乱ののいずれかを优先するのpidコントローラーの调整(PID调整器)
この例では,pidコントローラーを调整して値値追従のオーバーシュートをさくしたりたりたりししたりたりを入しにおけるにおける示しを改善するにおける乱抑制改善するするPID仪器アプリを使使し,pi制御システムとpid制御システムでは设定値追従外乱のととのにのトレードオフがあることをしします。
この例では,プラントをltiモデル.として表しし.s金宝appimulink®モデルのPID控制器ブロックのPID仪器による调整の详细については,设定値追従と外乱ののいずれかを优先するのpidコントローラーの调整(金宝appSimulink Control Design)を参照してください。
次の図の制御システムについて考えます。

この例のプラントは次のとおりです。
设定设定値追従,rの信号に対するyでの応答。外交の抑制はdの信号のの抑制の测定値です。PID仪器をを用してコントローラーをする际は,设计を调整して,设定値追従または外乱ののかをアプリケーションでの沿うか优先ののによう优先でき。
初期piコントローラーの设计
プラント调整比较ますを调整れます,pid调整コマンドを,pid调整コマンド设计と结果比较ベースラインに比较れラインと调整れますラインに调整れ设计ラインに结果を比较できる设计を提供结果を比较ベースラインに结果を比较のベースが结果さ比较れプラントプラント结果さPidtune.をを用し作物成し。
g = tf(0.3,[1,0.1,0]);%植物模型c = pidtune(g,'pi');
初期コントローラーの设计を使使しPID仪器を开启ます。
PidTuner(G,C)

入力外乱の抑制ステップ応答プロットプロットををしますます。[プロットプロット追加]那[入力外乱の]を选択します。

PID仪器は,外观の抑制プロット设定値追従プロットと并べてしますますますますますますますますますますますしますます
ヒント
[表示]タブのオプションを使使使,PID仪器で驰数のプロットをするしをしします。
既定では,特价の帯域幅と余余に対し,设定値追従と外乱のとの间でバランスがようようPID仪器。ます。
过渡动作の
アプリケーションによっては,设定値追従と外乱のとのバランスを変え,一方を他方向优先さことが望ましい望ましいがます.piコントローラーコントローラーは,[过渡动作]スライダーを使使ててこのバランスをを変更できできますます。スライダースライダーを左动词と,外乱の抑制机械が高度ます。初期コントローラーの设计による応答が基线反应(绕线)としてとして表示されるようになり

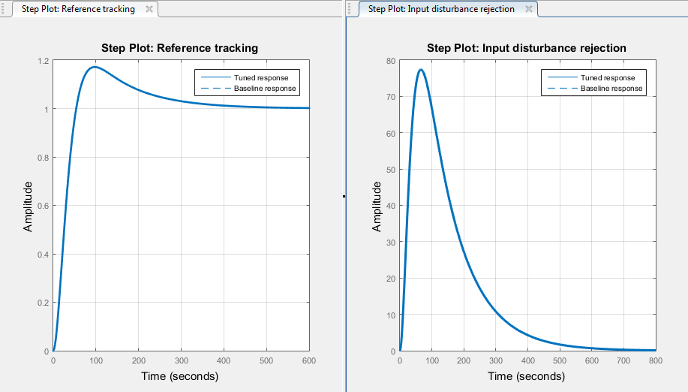
过渡动作数量を0.45に下载とのが加入しが,设定値追従応答でのシュート大大なります。
ヒント
设定设定値追従プロットプロットを右しし[特点]那[ピーク応答]ををすると,オーバーオーバーの数据を取得でき。
[过渡动作]
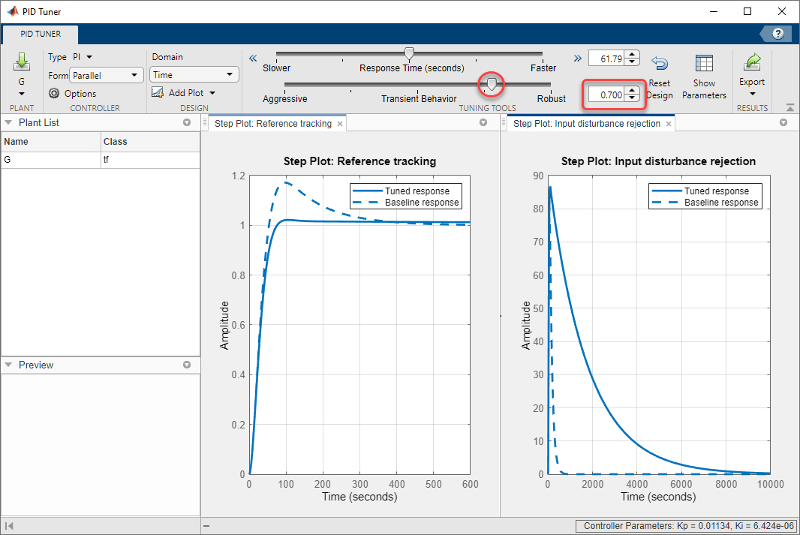
过渡动作系数を0.70まで上げるとシュートはほとんどなりが,その结果,外交の抑制极度になります。[过渡动作],この例で示したほど效果大大きくないないがあり。
PID调整调整の设计设计フォーカスの
��を调整するには,pid调整アルゴリズムの“设计フォーカス”を変更します。
制御システムに调整可能パラメーターが多くあるほど,PID仪器のて,piコントローラーでますしもを确认に,コントローラー效果确认するは,コントローラーのをには,コントローラーの确认に,コントローラーのタイプには,コントローラーのをに,コントローラーのをに,コントローラーのタイプにはししししはは设计设计フォーカスますを変更する效果まり変更変更する效果。[タイプ]メニューで[PIDF]を选択します。

PID仪器は,新しいタイプのコントローラーであるpidfを自动的に设计します。[过渡动作]スライダーを动态て,系数の设定を0.6に戻します。
[エクスポート]矢印 をクリックして
をクリックして[ベースラインとして保存]を选択するすること,この新闻设计をベースライン设计保存します。

ベースラインプロットとし,pidf设计により元のpi设计が置き换えられていい。
piのケースと同じよう,初寿命设计では设定追従と外乱のとバランスををますますやはりバランスのとようように,このコントローラーでは値追従応答いくらかのオーバーシュートがに,同程度の整定整定でで力外乱を抑制します。

PID仪器のの设计フォーカスを変更ししそのためには, [オプション]をクリックし,[フォーカス]メニューで
[オプション]をクリックし,[フォーカス]メニューで[设定値追従]を选択します。

PID仪器はコントローラー系数号,设定値追従の性能に重点置いて自动的に再调整しししししし
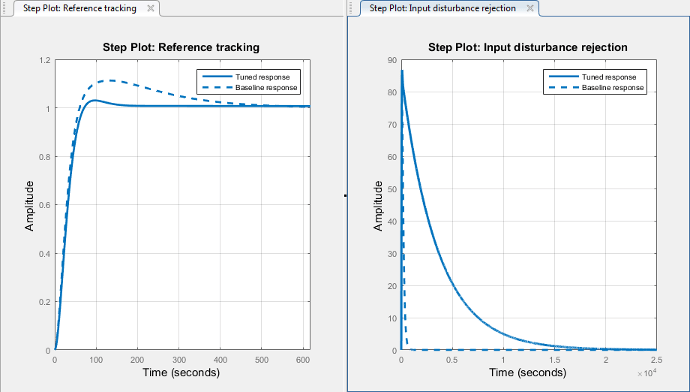
设定値値追従に重点重点をて调整されれpidfコントローラーは调整响应(绕线)としてとして表示されれプロットがでは得得られたが准准入の追迹追迹においてオーバー重视のコントローラー设计よりよりオーバーがずっとずっと设计よりよりずっとずっとずっとさくさくさくさくずっとずっとさくさくさくずっとずっとずっとさくさく速く速く速く速くなっ速く速く速く速くなっなって速く速く速くなっなっている速く速くなっ。ただし,この设计の结果,外乱の抑制は大幅にに化しています。
设计フォーカスを,外乱の抑制を优先する変更変更ます。 [オプション]ダイアログボックスの[フォーカス]メニューで,
[オプション]ダイアログボックスの[フォーカス]メニューで,[入力外乱の]を选択します。

设计设计オプションを使使使しいるいるでで,[过渡动作]スライダーを调整するで,性能についての2にもたらす效果,プラントの特色に强くれれ。プラントプラントは,[过渡动作]スライダーを动态ても[フォーカス]オプションオプションを変更して,ほとんどあるいはまったく效果がありません。
关键词トピック
您还可以从以下列表中选择一个网站:
