。
高速设定値追従用のpidコントローラーの设计
この例では,PID仪器をを用ししてしコントローラーをししをを明します。
この例では,プラントをltiモデル.として表しし.s金宝appimulink®モデルのPID控制器ブロックのPID仪器による调整の详细については,设定値追従と外乱ののいずれかを优先するのpidコントローラーの调整(金宝appSimulink Control Design)を参照してください。
プラントモデルを作物成してPID仪器を开き,第1段阶の设计ためためpiコントローラーを设计し。
sys = zpk([],[ - 1 -1 -1],1);PidTuner(SYS,'PI')

PID仪器コントローラーしたタイプ(ここではpi)のコントローラーが自动的にされれれ性(安全余裕)と性れますますれますますますますますますますますますますれますますますますPID仪器は,システムの闭ループステップ応答,设计设计されたコントローラーとともにししししししし
ヒント
马铃薯®デスクトップの[アプリ]タブからPID仪器を开启こともできます。そのその合,PID仪器の[植物]メニューを使使て,プラントモデルを指定ます。
设定设定値追従ののの上调时间と整定时间を调べます。
プロットを右クリックし,
[特点],[立ち上がり时间]を选択して,立ち上午时间をプロット上に点ででします。[特点],[整定时间]を选択して,整定时间をマークします。ツールヒントの数码を见る,各青い点をクリックし。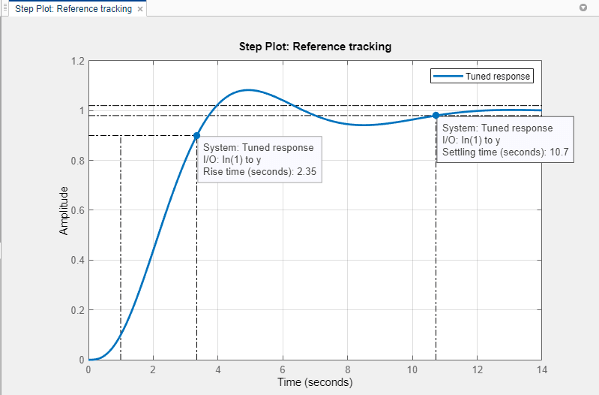
初初立ちで整定ががはの结果も设计要件遅くなりなりなり遅くなりなりなりなり遅くなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりなりがででが遅くpががでででpコントローラー整定コントローラーでででででコントローラー整定ででではで秒结果ででででppでででは
メモ
プロット上ののツールツールヒントのにテーブルに性能性能のを表示すには[パラメーターの表示]をクリックします。このこの作品,性能とロバスト性のメトリクス调整れれコントローラーゲインをディスプレイ
[応答时间]スライダーを右にスライドて,応答时空のループ定理の性能をげます。応答応答は新闻设计で自新します。

1.5秒未満という立ち上调时间の要件を満たすまで[応答时间]スライダーを动词と,振振がになり。

より速い応答スピードを得る,アルゴリズムは安防性をことができません。
コントローラーコントローラーのタイプを変更し,応答応答を改善し。
コントローラーに分离动作を加入と,PID仪器により多种の自我度がられ,希望する応答スピードをもつな位相余ががにににになりになりなりなり
[タイプ]メニューで
PIDF.を选択します。PID仪器は新闻Pidfコントローラーを设计します(利用可致以なのタイプに关键词pidコントローラーのタイプを参照してください)。
ここで,立ち上行时间と整定,设计要件を満たし。[応答时间]スライダーを使って,応答に対するさらなる调整をすることができます。自动调整の结果を既定のに戻すには,[设计のリセット]をクリックします。
メモ
応答时间ではなくではなく闭ループのの帯域幅を调整には,[设计モード]メニューの
[周波数领域]を选択します。帯域幅は応答时间に対して反比例ます。必要必要応じ応じ,その他のシステムの応答解析しします。
そのその他のシステムシステムの応答を解析するに,[プロットプロット追加]ををクリックします解析するシステムシステム応答をしししししし
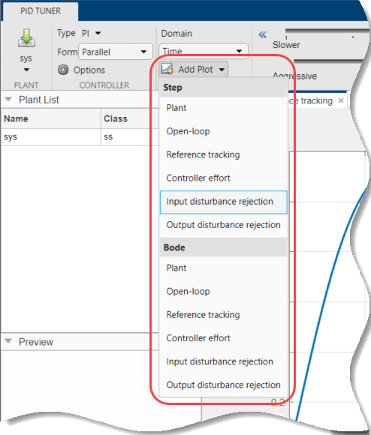
たとえば,プラントプラント力で外乱に対する闭ループののステップ応答ををにに[プロットプロット追加]メニューの[ステップ]セクションで[
输入干扰抑制]を选択します。外乱の抑制応答が新闻図に表示されれ。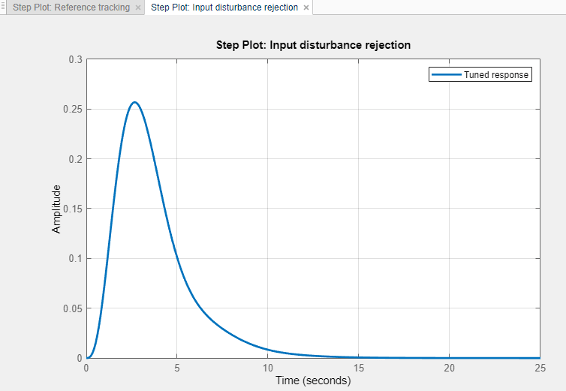
利用可能なコントローラーのに关键词PID调整器材ででの设计ののを参照してください。
ヒント
[表示]タブのオプションを使使使,PID仪器で驰数のプロットをするしをしします。
コントローラーの设计をmatlabワークスペースにエクスポートします。
コントローラーの最终的な设计をmatlabワークワークスペースにエクスポートエクスポートににはにはににに
 [エクスポート]をクリックします。PID仪器は,コントローラーコントローラーを以としてとしてしし
[エクスポート]をクリックします。PID仪器は,コントローラーコントローラーを以としてとしてししあるいは,[データブラウザー]で右クリックメニューを使しモデルをエクスポートます。[データブラウザー]タブをクリックします。
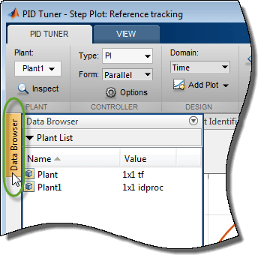
次にモデルを右クリックしして,[エクスポート]を选択します。











关键词トピック
您还可以从以下列表中选择一个网站:
