このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
PID調整器での設計の解析
控制系统工具箱™のPID調整器には,LTIモデルによって表されるプラント用のPIDコントローラーを調整するためのシステム応答プロットや他のツールが用意されています。
金宝app®モデルを使用したPID調整器での解析の詳細については,PID調整器での設計の解析(金宝app仿真软件控制设计)を参照してください。
システム応答のプロット
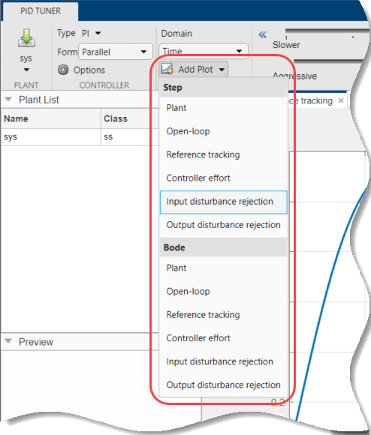
補償器設計が要件を満たしているかどうかを判断するには,応答プロットを使用してシステム応答を解析できます。[PID調整器)タブで,[プロットの追加)メニューから応答プロットを選択します。[プロットの追加)メニューでは,いくつかのステッププロット(時間領域応答)やボード線図(周波数領域応答)から選択することもできます。
π,PIDF、PDFなどの1-DOF PIDコントローラータイプの場合,ソフトウェアは次の単一ループ制御アーキテクチャに基づいてシステム応答を計算します。ここでGは指定したプラント,CはPIDコントローラーです。

皮,PIDF2, I-PDなどの二自由度PIDコントローラータイプの場合,ソフトウェアは次に示すアーキテクチャに基づいて応答を計算します。

システム応答は,2自由度PIDコントローラーで説明されているように,設定点コンポーネントCrとフィードバックコンポーネントCyへの二自由度PIDコントローラーCの分解に基づいています。
次の表は,解析プロットに使用可能な応答をまとめています(的朋友モデルなどの周波数応答データプラントでは,時間領域の応答プロットは利用できません)。
| 応答 | プロットされたシステム(1-DOF) | プロットされたシステム(双自由度) | 説明 |
|---|---|---|---|
プラント |
G | G | プラント応答。プラントのダイナミクスを調べるために使用します。 |
開ループ |
GC | gcy | 開ループのコントローラープラントシステムの応答。周波数領域設計に使用します。 設計仕様に,開ループのゲイン余裕および位相余裕など,ロバスト性の基準が含まれている場合に使用します。 |
設定値追従 |
(rからyへ) |
(rからyへ) |
設定点でのステップ変化に対する閉ループのシステム応答。設計仕様に設定点の追従が含まれている場合に使用します。 |
コントローラーの出力 |
(rからuへ) |
(rからuへ) |
設定点でのステップ変化に対する閉ループのコントローラー出力応答。設計が,コントローラーの飽和などの実際の制約で制限されている場合に使用します。 |
入力外乱の抑制 |
(d1からyへ) |
(d1からyへ) |
負荷外乱(プラント入力でのステップ外乱)に対する閉ループのシステム応答。設計仕様に入力外乱の抑制が含まれている場合に使用します。 |
出力外乱の抑制 |
(d2からyへ) |
(d2からyへ) |
プラント出力でのステップ外乱に対する閉ループのシステム応答。モデル化誤差に対する感度を解析する場合に使用します。 |
調整された応答とベースライン応答との比較
ベースラインコントローラーが定義されている場合,既定では,現在のPID調整器の設計を使用した応答とベースラインコントローラーを使用した応答との両方がPID調整器に表示されます。

ベースラインコントローラーを定義する方法には次の2つがあります。
PID調整器を開くときに,構文
pidTuner (sys, C0)を使用してベースラインコントローラーを読み込む。[エクスポート]矢印
 をクリックして
をクリックして[ベースラインとして保存)を選択することにより,現在のPID調整器の設計を任意のタイミングでベースラインコントローラーにする。
これを行う場合,現在の[調整された応答]が[ベースライン応答]になります。現在の設計をさらに調整すると,新たな[調整された応答]のラインが作成されます。
[ベースライン応答]を非表示にするには,
 [オプション]をクリックし,[ベースラインコントローラーのデータの表示)をオフにします。
[オプション]をクリックし,[ベースラインコントローラーのデータの表示)をオフにします。



システム特性の数値の表示
以下のいずれかの方法で,ピーク応答,ゲイン余裕などのシステム特性の値を表示できます。
応答プロットで直接的に表示,右クリックメニューを使用して特性を追加すると,青色のマーカーが表示されます。次に,マーカーをクリックすると,対応するデータパネルが表示されます。
(性能とロバスト性)テーブルで表示,このテーブルを表示するには,
 [パラメーターの表示)をクリックします。
[パラメーターの表示)をクリックします。


設計の改良
初期のコントローラー設計の応答が要件を満たしていない場合は,設計を対話形式で調整できます。PID調整器には,コントローラー設計を改良するための2つの[領域]オプションがあります。
[
時間]領域(既定)[応答時間]スライダーを使用して,制御システムの閉ループ応答を速めたり遅らせたりします。[過渡動作]スライダーは,コントローラーを外乱の抑制に対してよりアグレッシブにしたり,プラントの不確かさに対してよりロバストにするために使用します。频率- - - - - -[帯域幅]スライダーを使用して,制御システムの閉ループ応答を速めたり遅らせたりします(応答時間は2 / wcでwcは帯域幅を表します)。[位相余裕]スライダーは,コントローラーを外乱の抑制に対してよりアグレッシブにしたり,プラントの不確かさに対してよりロバストにするために使用します。
いずれのモードにおいても,設定値追従と外乱の抑制の性能間にトレードオフが生じます。このトレードオフを調整するためのスライダーの使用方法を説明した例は,設定値追従と外乱の抑制のいずれかを優先するためのPIDコントローラーの調整(PID調整器)を参照してください。
ヒント
スライダーを動かした後,初期のコントローラー設計に戻すには [設計のリセット]をクリックします。
[設計のリセット]をクリックします。
関連するトピック
你也可以从以下列表中选择一个网站:
