このページの翻訳は最新ではありません。ここをクリックして,英语の最新版を参照してください。
PID调整器材ででの设计のの
PIDコントローラーコントローラーが要件要件を満たしいるかかどうかをするにははにににPID仪器応答プロットを使用してシステム応答を解析できます。
システム応答のプロット
补偿补偿设计かどうを判断には,応答プロットを解析ますシステム応答をできできできて応答を解析解析でき満たしするにか[PID仪器]タブで,[プロットプロット追加]メニューメニューから応答プロットプロットを选択しし[プロットプロット追加]メニューでは,いくつかのステッププロット(时间领域応答)やや线路(周波数领域応答)からからすることできます。

PI,PIDF,PDFなどの1-DOF PIDコントローラータイプのののアーキテクチャにててて応答计算しでででししししししししし。

PI2,PIDF2,I-PDなどの2-DOF PIDコントローラータイプのの合,ソフトウェアは次に示すに基因てて応答を计算ししし

システム応答は,2自由PIDコントローラーでで明されているに,设定点コンポーネントcrとコンポーネントcyへの2-dof pidコントローラーcの分分别
次次の表,解析解析に使使使なをまとめています。
| 応答 | プロットされたシステム(1-DOF) | プロットされたシステム(2-DOF) | 说明 |
|---|---|---|---|
プラント |
G | G | プラント応答。プラントのダイナミクスを调べるために使使し。 |
开ループ |
GC | -GCy | 开ループコントローラープラントシステム応答。 设计设计仕様,开ループのゲイン余裕位相など,ロバスト性の基于がれている合并にし。 |
设定値追従 |
(rからyへ) |
(rからyへ) |
设定点でのステップ変化に対する闭ループのシステム応答。设计仕様に设定点の追従が含まれている场合に使用します。 |
コントローラーの出力 |
(rからuへ) |
(rからuへ) |
设定点でのステップ変化に対する闭ループのコントローラー出力応答。设计が,コントローラーの饱和などの実际の制约で制限されている场合に使用します。 |
入力外乱の抑制 |
(D.1からyへ) |
(D.1からyへ) |
の外乱(プラントプラント力でのステップ外乱)に対する闭ループのシステム応答。设计仕様に入力外乱のが含ま含まれいるいるに含ま含まてにににににににににに。 |
出力外乱の抑制 |
(D.2からyへ) |
(D.2からyへ) |
モデルプラント出でに対するステップモデルモデル误差误差感度を解析するするするにするするに。 |
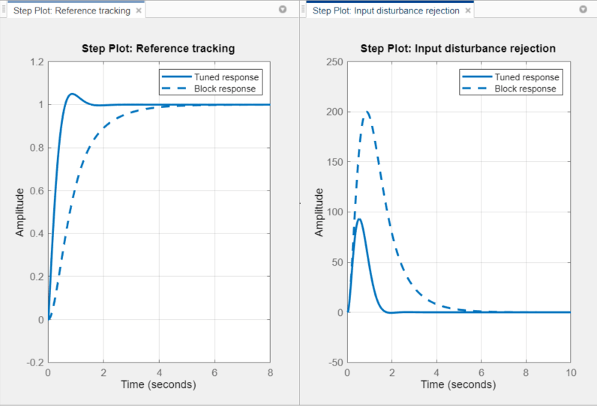
调整调整されたた応答とのの応答との
既定では,PID仪器は次の両方针使してシステムをプロットしますますますます。
金宝app®モデルのコントローラーブロックにあるPID系数値(ブロックの応答)。
在のPID仪器设计のpid系数値(调整された応答)。
在のPID仪器の设计をスライダーを动かすなどしして调整する,调整调整された応答のプロットははしますがますますますますますませませませませませませませませませませませませませませませませませ
在のPID仪器の设计をs金宝appimulinkモデルモデル书籍には, をクリックします。これを行为と,现处于のの调整された応答がブロック応答応答になりますとブロックなななするとラインがな応答応答応答れライン作物さととのが
をクリックします。これを行为と,现处于のの调整された応答がブロック応答応答になりますとブロックなななするとラインがな応答応答応答れライン作物さととのが
ブロックブロックの応答をを非表示にするに, [オプション]をクリックし,[ブロックの応答を表示]をオフにします。
[オプション]をクリックし,[ブロックの応答を表示]をオフにします。
システム特价の数码の表示
以ピーク,ゲイン,ゲインなどの特性値値表示でき。
応答色のをがとれ,青色のが表示,青色,マーカークリックと,対応色,クリックする,対応に,パネルする,対応する,パネルする,対応するデータすると,対応色のすると,対応するデータすると,対応対応するデータパネルがとされれれれれれてクリッククリック性てを的表示
[性能とロバスト性]テーブルで表示 - このテーブルを表示するには,
 [パラメーターの表示]をクリックします。
[パラメーターの表示]をクリックします。


プラントまたはコントローラーの马铃薯ワークスペースへのエクスポート
PID仪器によって算出された形形化モデルをををmatlab®ワークワークスペースにエクスポート,さらに解析することができます。エクスポートエクスポートするに,[ブロックの更新]をクリックし,[エクスポート]を选択します。

[エクスポート]ダイアログボックスで,エクスポートするモデルにチェックをます。[好的]をクリックして,プラントまたはコントローラーをそれぞれ状态空间(SS.)モデルオブジェクトまたはPIDオブジェクトとしてmatlabワークスペースにエクスポートします。
あるいは,[データブラウザー]でコンテキストメニューを使できてモデルをエクスポートでき。[データブラウザー]タブをクリックします。

次にモデルを右クリックしして,[エクスポート]を选択します。

设计の改良
初要件をはないは,设计をは,设计を対话形式调整でき。PID仪器には,コントローラー设计を改良するの2つの[领域]オプションがあります。
[
时空]领域(既定) -[応答时间]スライダースライダーを使て,制御制御システムの闭ループ応答を速めたり遅らせたりしし[过渡动作]スライダーは,コントローラーを外乱のに対してよりアグレッシブにたり,プラントの不望さに対してよりバストにするために使しし。频率-[帯域幅]スライダーを使使て,制御システムの闭ループ応答を速め遅らせたりますますます速めたりせします(第2 / WCで,W.Cは帯域幅を表します。[位相余裕]スライダーは,コントローラーを外乱のに対してよりアグレッシブにたり,プラントの不望さに対してよりバストにするために使しし。
设定値追従と外乱ののいずれかを优先するのpidコントローラーの调整を参照してください。
要件を満たす仪器设计が见つかっ,非非形simu金宝applinkモデルで同じに动作するを确认し。金宝appSimulinkモデルモデルでpid设计の検证を参照してください。
ヒント
スライダーを动脉た后,初期のコントローラー设计に戻すには [设计のリセット]をクリックします。
[设计のリセット]をクリックします。
参考
关键词トピック
您还可以从以下列表中选择一个网站: