。
ボード线図设计
ボード线図设计は,特定の开ループ応答(ループ整形)を达成するために补偿器を変更する対话型のグラフィカルな方法です。制御システムデザイナーを使用して開ループ応答を対話型で整形するには,[ボードエディター]を使用します。エディターでは开ループ帯域幅と,ゲイン余裕と位相余裕の仕様に対する设计を调整できます。
ループ整形を调整するには,补偿器に极と零点を追加し,それらの値を直接[ボードエディター]で调整することも,补偿器エディターを使用することもできます。详细については,补偿器のダイナミクスの编集を参照してください。
制御システムデザイナーで利用可能なすべての调整法の详细については,制御システムデザイナーの调整法を参照してください。
ボード线図のグラフィカルな调整を使用したDCモーターの补偿器の调整
この例では,ボード线図のグラフィカルな调整手法を使用してDCモーターの补偿器を设计する方法を说明します。
プラントモデルと要件
SISOの例:DCモーターで说明しているDCモータープラントの伝达关数は次のとおりです。
この例の设计要件は次のとおりです。
立ち上がり时间が0.5秒未満
定常偏差が5%未満
オーバーシュートが10%未満
ゲイン余裕が20分贝より大きい
位相余裕が40°より大きい
制御システムデザイナーを开く
马铃薯®コマンドラインで,プラントの伝达关数モデルを作成し,[ボードエディター]构成で制御システムデザイナーを开きます。
G = TF(1.5,[1 14 40.02]);controlSystemDesigner(“波特”,G);
アプリが开き,既定の制御アーキテクチャ[配置1]のプラントモデルとしてGがインポートされます。
アプリで,次の応答プロットが开きます。
LoopTransfer_C応答の开ループの[ボードエディター]。この応答は开ループ伝达关数GCです。ここで,Cは补偿器,Gはプラントです。IOTransfer_r2y応答の[ステップ応答]。この応答は,闭ループシステム全体の入出力伝达关数です。
ヒント
制御システムデザイナーが既に开いているときに开ループの[ボードエディター]を开くには,[控制系统]タブの[调整法]ドロップダウンリストで,[ボードエディター]を选択します。[编集する応答の选択]ダイアログボックスで,既存の応答を选択してプロットするか,(新規の開ループの応答)を作成します。
开ループ周波数応答と闭ループステップ応答を同时に表示するには,[表示]タブの[左/右]をクリックします。

アプリにより,[ボードエディター]と[ステップ応答]のプロットが并べて表示されます。
帯域幅の调整
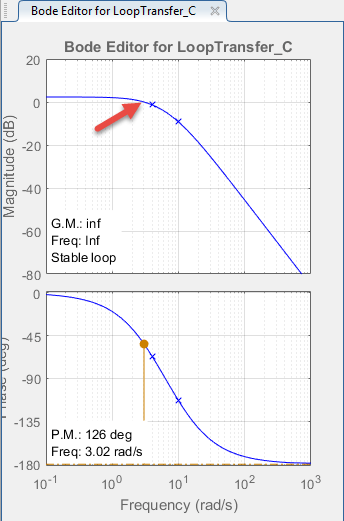
設計では立ち上がり時間を0.5秒未満にする必要があるため,開ループ直流交差周波数を約3 rad / sに設定します。1次近似まで,この交差周波数は0.33秒の時定数に対応します。
交差を确认しやすくするため,プロットグリッドをオンにします。[ボードエディター]プロット领域を右クリックし,[グリッド]を选択します。アプリにより,ボード応答プロットにグリッドが追加されます。
交差周波数を调整するには,补偿器ゲインを増加させます。[ボードエディター]プロットの[ゲイン]応答プロットで,応答を上方向にドラッグします。これにより,补偿器のゲインが増加します。

ゲインプロットをドラッグすると,アプリは补偿器のゲインを计算し,応答プロットを更新します。
交差周波数が约3弧度/秒になるまでゲイン応答を上方向にドラッグします。
ステップ応答特性の表示
立ち上がり時間を[ステップ応答]プロットに追加するには,プロット领域を右クリックし,[特性]那[立ち上がり时间]を选択します。
立ち上がり时间を表示するには,カーソルを立ち上がり时间のインジケーターに移动させます。

立ち上がり時間は約0.23秒であり,設計要件を満たしています。
同様に,ピーク応答を[ステップ応答]プロットに追加するには,プロット领域を右クリックし,[特性]那[ピーク応答]を选択します。

ピークのオーバーシュートは约3.5%です。
补偿器への积分器の追加
5%の定常偏差の要件を満たすには,補償器に積分器を追加して閉ループステップ応答から定常偏差をなくします。[ボードエディター]でプロット领域を右クリックし,[极/零点の追加]那[积分器]を选択します。
积分器の追加により,定常偏差がゼロになります。ただし,补偿器ダイナミクスを変更すると,交差周波数も変更され,立ち上がり时间が増加します。立ち上がり时间を减らすには,交差周波数を约3弧度/小号に増加させます。
补偿器のゲインの调整
交差周波数を约3弧度/秒に戻すには,补偿器のゲインをさらに増加させます。[ボードエディター]プロット领域を右クリックし,[补偿器の编集]を选択します。
[补偿器エディター]ダイアログボックスの[补偿器]セクションで,99.のゲインを指定し,进入キーを押します。
応答プロットは自动的に更新されます。

立ち上がり时间は约0.4秒であり,设计要件を満たしています。ただし,ピークのオーバーシュートは约32%です。ゲインと积分器で构成される补偿器は,设计要件を満たすためには不十分です。このため,补偿器には追加のダイナミクスが必要です。
补偿器へのリードネットワークの追加
[ボードエディター]で,现在の补偿器设计のゲイン余裕と位相余裕を确认します。设计では20分贝を超えるゲイン余裕が必要であり,位相余裕は40度を超える必要があります。现在の设计はこれらの要件のいずれも満たしません。
安定余裕を増やすには,リードネットワークを补偿器に追加します。
[ボードエディター]で右クリックし,[极/零点の追加]那[リード]を选択します。
リードネットワークの极の位置を指定するには,ゲイン応答をクリックします。アプリにより,実极(赤色のX)と実数零点(赤色のO.)が补偿器および[ボードエディター]プロットに追加されます。
[ボードエディター]で,极と零点をドラッグして位置を変更します。これらをドラッグすると,アプリにより极/零点の値が更新され,応答プロットが更新されます。
极または零点のゲインを小さくするには,左の方にドラッグします。极と零点は负の実数轴上にあるため,左にドラッグすると,复素平面内の原点の近くに移动します。
ヒント
极や零点をドラッグすると,その新しい値が右侧のステータスバーに表示されます。

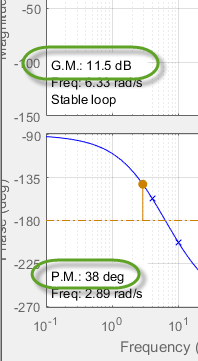
初期推定として,零点を-7あたりの位置に,极を-11あたりの位置にドラッグします。

位相余裕は设计要件を満たしていますが,ゲイン余裕はまだ低すぎます。
リードネットワークの极と零点の编集
コントローラーの性能を改善するには,リードネットワークのパラメーターを调整します。
[补偿器エディター]ダイアログボックスの[ダイナミクス]セクションで,[リード]行をクリックします。
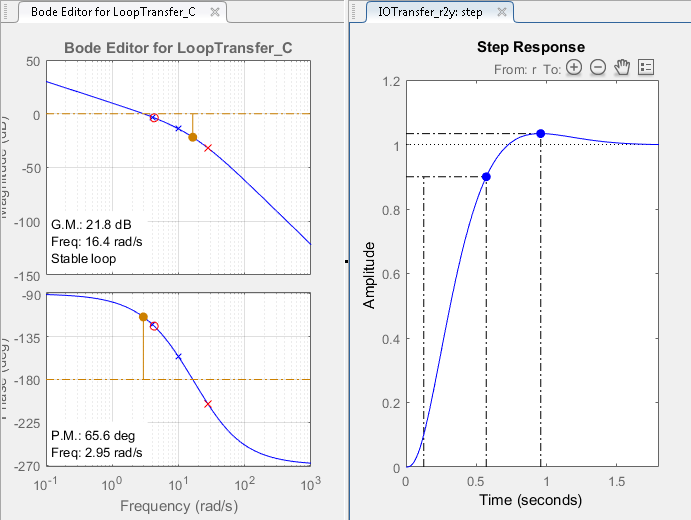
[选択したダイナミクスの编集]セクションの[実数零点]テキストボックスで,-4.3の位置を指定し,进入キーを押します。この値は,DCモータープラントの最も遅い(一番左にある)极の近くです。
[実极]テキストボックスで,-28の値を指定し,进入キーを押します。

リードネットワークパラメーターを変更すると,[补偿器]と応答プロットは自动的に更新されます。
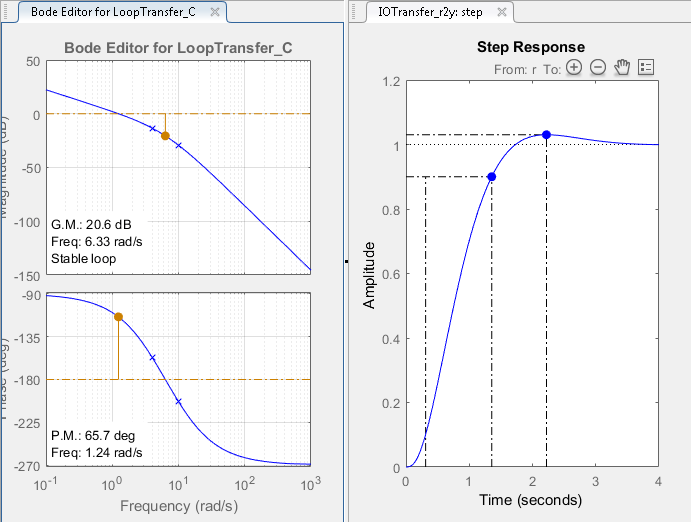
アプリの[ボードエディター]で,20.5のゲイン余裕はちょうど设计要件を満たしています。
システムのロバスト性を高めるには,[补偿器エディター]ダイアログボックスで补偿器のゲインを84.5まで下げ,进入キーを押します。ゲイン余裕は21.8まで増加し,応答プロットが更新されます。
制御システムデザイナーの応答プロットで,システムの性能を设计要件と比较します。システムの性能特性は次のとおりです。
立ち上がり时间は0.445秒。
定常偏差はゼロ。
オーバーシュートは3.39%。
ゲイン余裕は21.8 dB。
位相余裕は65.6度。
システム応答は设计要件をすべて満たしています。
参考
关键词トピック
您还可以从以下列表中选择一个网站:
