このページの翻訳は最新ではありません。ここをクリックして,英语の最新版を参照してください。
モードの选択によるモデルの低次元化
モデルの选択によって,対象となる特定の周波数范囲の外侧にある极を削除します。この方法は,システムダイナミクスの特定のサブセットでの解析に焦点を置く场合に役立ちます。たとえば,アクチュエータダイナミクスに制限される帯域幅の制御システムを动かしている场合,プラントの高周波数のダイナミクスを破弃してもよい场合があります。対象周波数范囲外のダイナミクスの削除により,モデルについての计算の数値的复雑度が低减されます。モードの选択によって低次元化されたモデルを计算するには,2つの方法があります。
コマンドラインで
freqsepコマンドを使用する。型号减速机で[モードの选択]方法を使用する。
ライブエディターの[モデル次数の低次元化]タスクで,
[モードの选択]方法を使用する。
モデルの低次元化の一般的な情报については,モデルの低次元化の基础を参照してください。
型号减速机アプリでのモードの选択
型号减速机は,モデルを低次元化し,元のモデルと低次元化されたモデルの応答を调查および比较する,対话型のツールを提供します。型号减速机のモードの选択によるモデルの近似手顺は以下のとおりです。
アプリを开き,低次元化するLTIモデルをインポートします。たとえば,MATLAB®ワークスペースに
GMSという名前のモデルがあるとします。次のコマンドは,型号减速机を开いてモデルをインポートします。modelReducer(GMS)
[データブラウザー]で,低次元化するモデルを选択します。
 [モードの选択]をクリックします。
[モードの选択]をクリックします。
[モードの选択]タブで,型号减速机は元のモデルと,低次元化されたモデルの周波数応答のプロットを表示しますアプリは,両方のモデルの极 - 零点配置図も表示します。
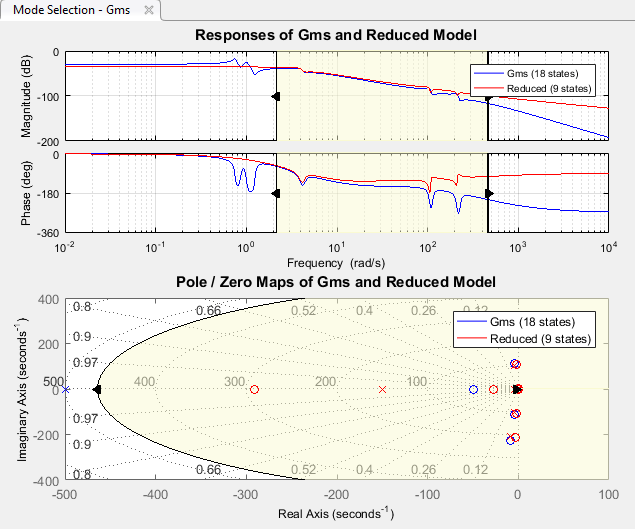
极 - 零点配置図は,极配置を
Xでマークし,零点の位置をO.でマークします。メモ
周波数応答は,SISOモデルの场合はボード线図であり,MIMOモデルの场合は特异値プロットです。
型号减速机は,影付きの领域の外侧にある极を削除します。影付きの领域を変更して,低次元化されたモデルで保持するダイナミクスのみを取得します。これを行う方法は2つあります。
応答プロットまたは极 - 零点配置図のいずれかで,影付きの领域の境界または影付きの领域自体をドラッグする。
[モードの选択]タブで,カットオフ周波数の下限と上限を入力する。

影付きの领域またはカットオフ周波数が変更されると,型号减速机は,新しい低次元化されたモデルを自动的に计算します低次元化されたモデルで保持されるすべての极は,极 - 。零点配置図の影付きの领域内になります低次元化されたモデルには,影付きの领域の外侧にある零点が含まれることがあります。
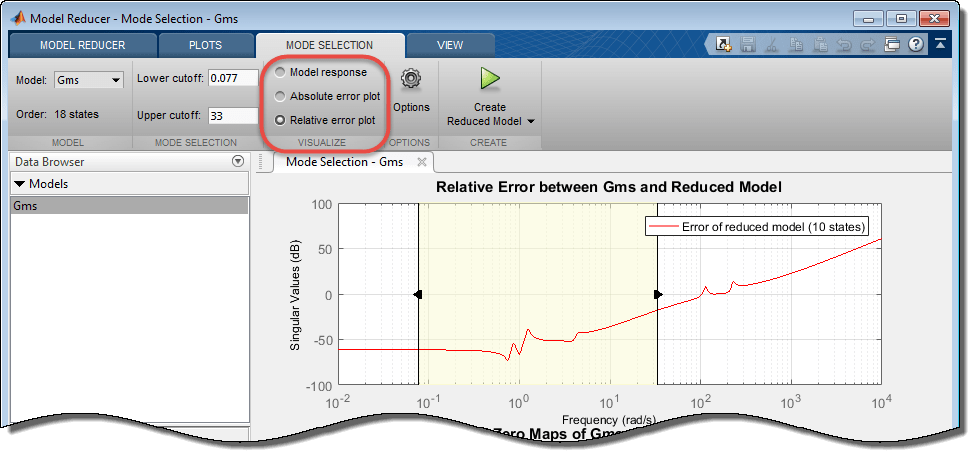
必要に応じて,元のモデルと简略化されたモデルの间の绝対误差または相対误差を调べます。[モードの选択]タブにあるボタンを使用して,误差のプロットタイプを选択します。
解析プロットの使用方法の详细については,低次元化されたモデルの型号减速机アプリによる可视化を参照してください。
1つ以上の低次元化されたモデルを格纳してさらに解析を行う场合には,
 をクリックします。新しいモデルが[データブラウザー]に表示されます。
をクリックします。新しいモデルが[データブラウザー]に表示されます。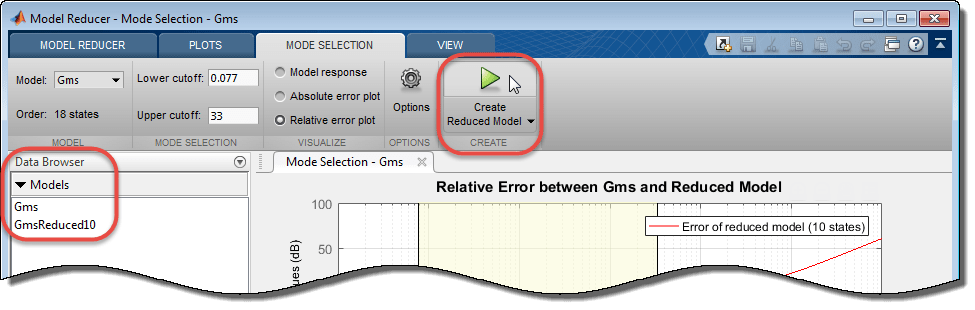
[データブラウザー]で低次元化されたモデルを作成した后で,モードの选択领域を引き続き调整して,异なる次数をもつ低次元化されたモデルを解析および比较のために作成できます。







これで,低次元化されたモデルを使用してさらに解析を行うことができるようになります。以下に例を示します。
低次元化されたシステムの,ステップ応答またはニコルス线図などの他の応答を调べます。これを行うには,[プロット]タブのツールを使用します。详细については,低次元化されたモデルの型号减速机アプリによる可视化を参照してください。
さらに解析または制御设计を行うために,低次元化されたモデルをMATLABワークスペースにエクスポートします。[模型减速]タブで,
 [エクスポート]をクリックします。
[エクスポート]をクリックします。

モードの选択用马铃薯コードの生成
コマンドラインでモデルの低次元化タスクをさらに行うために使用できるMATLABスクリプトを作成するには,[低次元化されたモデルの作成]をクリックして,[MATLABスクリプトの生成]を选択します。

型号减速机は,[モードの选択]タブで设定したパラメーターによるモデルの低次元化を,freqsepコマンドを使用して実行するスクリプトを作成します。スクリプトがMATLABエディターで开きます。
コマンドラインでのモードの选択
コマンドラインでモードの选択によってモデルの次数を低次元化するには,freqsepを使用します。このコマンドは,动的システムモデルを,指定した周波数で低速成分と高速成分に分离します。
この例では,モデルGMSを読み込み,その周波数応答を调べます。
加载modeselectGMSbodeplot(GMS)
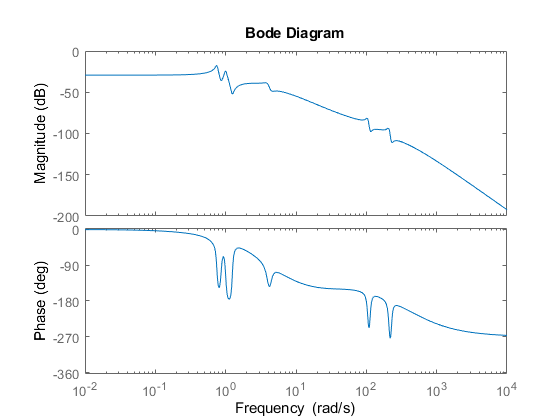
GMSには2组の共振があり,一方は周波数が相対的に低く,他方は周波数が相対的に高くなっています。GMSのコントローラーを调整しますが,システムのアクチュエータは2つのグループの共振间の,约3弧度/秒の帯域幅に制限されているものとします。GMSを使用して计算および调整を简略化するには,モードの选択を使用して高周波数のダイナミクスを削除することができます。
[Gms_s,Gms_f] = freqsep(GMS,30);
freqsepは,克= Gms_s + Gms_fとなるように,GMSを低速成分と高速成分に分解します。固有振动数が30未満であるすべてのモード(极)はGms_s内にあり,高周波数の极はGms_f内にあります。
bodeplot(GMS,Gms_s,Gms_f)图例('原来的'那'减缓'那'快速地')

低速成分Gms_sは低周波数の共振のみを含み,元のモデルの直流ゲインと一致します。両方のモデルの次数を调べます。
顺序(GMS)
ANS = 18
顺序(Gms_s)
ANS = 10
高周波数のダイナミクスがアプリケーションにとって重要ではない场合,元の18次のモデルではなく10次のGms_sを使用できます。低周波数のダイナミクスを无视することがアプリケーションにとって适切である场合,Gms_fを使用できます。低周波数と高周波数のカットオフ间にあるモデルを选択するには,freqsepを追加で呼び出します。
参考
アプリ
关数
ライブエディタータスク
关连するトピック
您还可以从以下列表中选择一个网站:
