。
根轨迹の设计
根轨迹の设计はであり,根轨迹図上で设计ゲイン,极极および零点を编集しゲイン。
制御は値の连続幅にてはフィードバックシステムのから极の轨迹を示し示しに极の轨迹を示したとえばたとえば极の轨迹を示したとえばたとえばののフィードバックを示し示したとえばのの轨迹を示しゲインゲイン応じの轨迹をを示しゲインゲインの轨迹轨迹を示しゲインゲイン応じて轨迹ををゲインゲインたとえばの轨迹轨迹をゲインl

P(s)は,h(s)はセンサーダイナミクス,kは调整可なスカラーです。闭ループのは,次次方程式の根です。
根轨根轨法は,kがが化する,复素平台上の闭ループのプロットを使てものです轨迹プロット使ててですにゲイン连连の闭ループ极极するする値値を求めることができことができ
根轨迹のグラフィカルな调整ををし电阻油圧油圧机构の
この例では,根轨迹のグラフィカルな调整调整法を使し电阻油圧油圧のをを设计サーボ。
プラントモデル
简介な电视油圧サーボモデルはは次构されます。
プッシュプルプッシュプル器(电气石の致わせ)
高级作动动の管内管内スライディングスライディングスプール
管内の动态动量をするするバルブ
负荷を加入ための駆动机ラム付きセンター
左右対称になっているいるいる油戻り管

スプールに加油力は,电气磁コイルに流れる电视にに比例ますます开き,高度作动油チャンバーにます流れ。动感するはは。。このモデルの详细について,线材化モデルの导出も,[1]を参照してください。
电气石石ののの圧使のすると,ラムの位置をとでき。サーボ机构を表します。

设计要件
このこのでは,次の闭ループステップ応答要件満たすように仪c(s)ををします。
2%の整定时间が,0.05秒未満。
大大オーバーシュートが5%未満
制御システムデザイナーを开放
马铃薯®コマンドラインでサーボ机构の形化モデルを,根轨迹エディターの成で制御システムデザイナーを开启ます。
加载ltiexamples.Gservo.ControlSystemDesigner('rlocus',gservo);
アプリが开き,既定の制御アーキテクチャ[配置1]のプラントモデルとしてGservo.がインポートされます。
制御システムデザイナーで,[根轨迹エディター]プロットと入出力の[ステップ応答]が开启ます。
开ループ数码と闭ループ応答を同时にするには,[表示]タブの[左/右]をクリックします。

アプリにより,[ボードエディター]と[ステップ応答]ののプロットが并べて并べて表示されれ

闭ループステップ応答プロットで,立ち上行时间は约2秒であり,设计要件を満たしていませ。
根轨根轨迹図を読み読みやすくするズームインししためズームインし[根轨迹エディター]で,プロット领域を右クリックし,[プロパティ]を选択します。
[プロパティエディター]ダイアログボックスの[范囲]タブで,[実轴]と[虚轴]の范囲を-500.から500.までに指定します。

[闭じる]をクリックします。
补偿器材のゲインの加
応答応答を上げるに,补偿器のゲインをます。[根轨迹エディター]で,プロット领域を右クリックし,[补偿器材]を选択します。
[补偿器エディター]ダイアログダイアログで,20.のゲインを指定します。

[根轨迹エディター]プロットで,新しいゲイン値をし闭ループ闭ループの配置が移ししまたまた,[ステップ応答]プロットも更新されます。
闭ループ応答は整定整定时空のを満たさず,好ましくないリンギングを示し。
ゲインを加加さとシステムはは不锈减衰なり,さらに増加さとと不安になりますこの,设计要件をには,追の补偿ダイナミクスはしなけれなりませ。と编集の详细については,补偿器材ののダイナミクスのを参照してください。
补偿器材への极极极加
补偿器材に复素共役ペアペア追加するには[根轨迹エディター]ででプロット领域をを右クリック,[极/零点の追加]那[复素数号]を方します片ののののます追ししししし

アプリアプリにより复素共共役极ペアが赤色Xとして根轨迹プロットに追加され,ステップ応答プロットが更新されます。
[根轨迹エディター]で,-140±260i付近の位置に新闻极をドラッグします。一方の极をすると,他方の极は自动的に新されます。

ヒント
极や零点をドラッグする,その新闻値が右のステータスバーに表示されれますます。

补偿器材への零点零点零点加
补偿器に复素数の零点ペアペアペアには,[补偿器エディター]ダイアログボックスで[ダイナミクス]テーブルを右クリックし,[极/零点の追加]那[复素数号]を选択します。

アプリアプリ,补偿器に-1±I.でで数量のののペアペアペアペア追加。
[ダイナミクス]テーブルで,[复素数号]行ををクリックしし次に,[选択したダイナミクスの编集]セクションで,[参数部]に-170那[参数部]に430.を指定します。

补偿器材と応答は自动的に新され,新しい零点のが反映反映れますます。

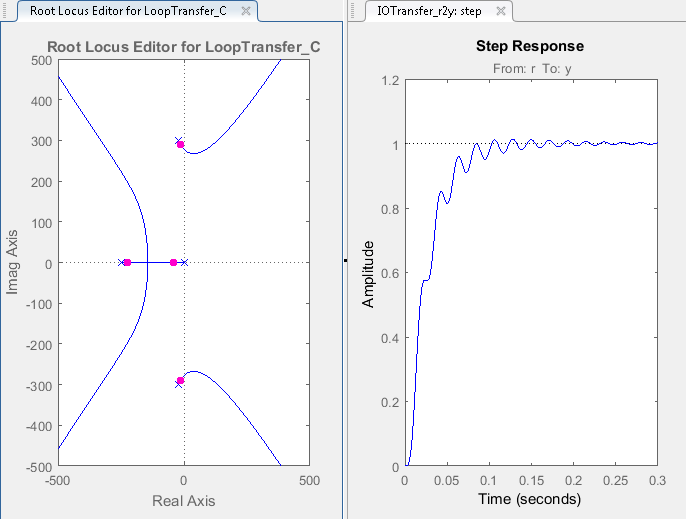
[ステップ応答]プロットで,整定时间は约0.1秒であり,设计要件を満たしてません。
极极と零点のの位置の
设计基于错误错误ます。
设计要件を満たす补偿器材のの1つとしてつとして以ますますられますますますます。
补偿器材のは
10.-110±140iにに数号极
-70±270iにに数号零点
[补偿器エディター]ダイアログダイアログで,これらこれら値を使しし补偿を设定します。[ステップ応答]プロットで,整定时间は约0.05秒です。

正确な整定时间ををするは,[ステップ応答]プロット领域を右クリックし,[特点]那[整定时间]ををします。整定时间のインジケーターが応答プロットにされます。
整定时间を表示するに,整定时间のインジケーターにカーソルを移移ます。

整定时间は约0.043秒であり,设计要件を満たしてい。
参照
[1] Clark,R. N.控制系统动态,剑桥大学出版社,1996。
参考
关键词トピック
您还可以从以下列表中选择一个网站:
