文档帮助中心文档
这些示例演示了不同的功能Simscape™动力传动系统™使用常见的工业应用。
由Simscape™Driveline™库中的皮带轮块表示的绞盘。100-N的张力应用到带A端保持一个可变负载在B端到位,即使负载增加。当负载力增加超过摩擦极限时,皮带会滑动。通过使用更高的摩擦系数或包角增加摩擦,可以让滑轮持有更大的负载力。这个例子还显示了突然转动绞盘,从5秒开始,会导致瞬间滑倒,很快就会恢复。
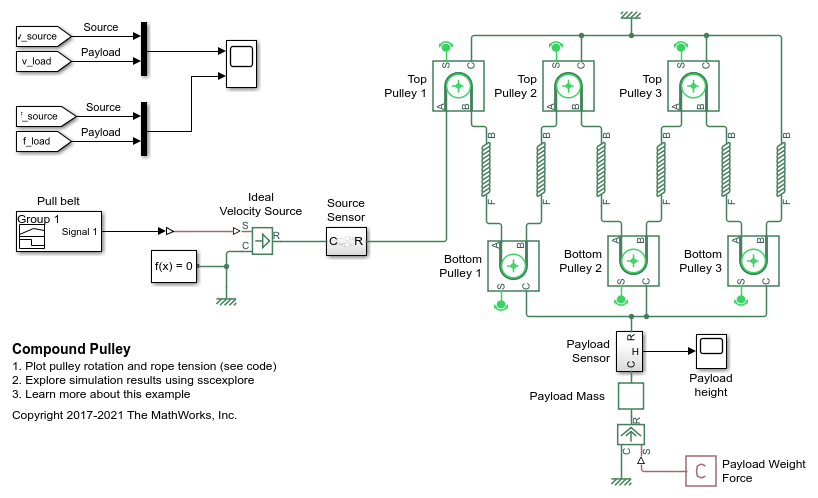
由Simscape™Driveline™库中的皮带轮和绳索块表示的滑车和滑车系统。这个复合滑轮是作为一个三倍购买与两个三块。该系统的机械优势是6。
两种方法创建一个恒定的旋转速度输出使用万向节。在第一种方法中,万向节的角度完全相反。输出轴轴平行于输入轴轴,但偏移了一些距离。
这个例子显示了一个功率计抵抗来自原动机的负载。这个原动机被建模为一个扭矩源,可以是一个内燃机,电驱动,或液压马达。dyno吸收输入扭矩达到其极限,并允许连接负载的旋转扭矩超过。动态本身是使用基本摩擦离合器建模与静态和动态限制设置扭矩限制。
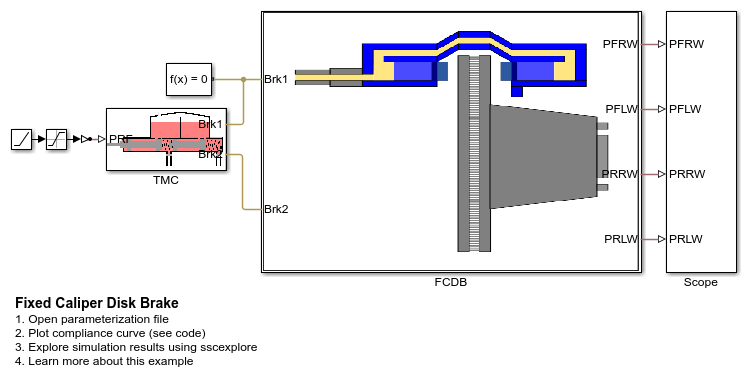
建模,参数化,并测试卡钳盘式制动器。该实例使用从串联主缸数据表中提取的数字数据来确定卡钳盘式制动器的优化设计。实例说明了如何为卡钳盘式制动器生成柔顺曲线。
提升有效载荷的液压机械起重机。一个理想的液压马达是由控制器控制的压力驱动的。控制器通过从电机的柔性轴读取角速度来估计当前有效载荷的高度。绳子被表示为一个弹簧和阻尼器,有效载荷被建模为一个带有重力的质量。
一种通过不平衡臂控制末端执行器方向的机械臂。电机被表示为一个扭矩源使用简单的比例控制。当末端执行器确保负载时,末端执行器上的负载急剧增加。在每个传感器上引入噪声,测量噪声对控制器性能的影响。
一种电动车窗系统。直流电机通过比例为1:50的自锁蜗轮驱动动力窗机构。动力窗机构由一个电缆卷筒和四个由电缆连接的滑轮组成。窗户通过升降板在两点上与钢缆相连。这确保窗口的两边以相同的速度和方向移动,保持窗口水平。该模型还包括导轨中的粘性摩擦。
一种由自锁丝杠和单向离合器组成的步进机构。单向离合器输入轴以速度幅值2 rad/s、频率0.5 rad/s振荡。单向离合器通过丝杠驱动负载。由于几何形状和螺纹摩擦,螺杆的导程角很小,足以确保自锁操作。因此,当离合器输入轴向相反方向旋转时,负载保持其位置,负载以大约25mm的增量步长移动。
钣金切割机的送料机构。两个分切辊由一个扭矩电机通过两个机械传动系统驱动。每个传动系由正齿轮系、蜗轮和链传动组成。链条传动的链轮连接到其各自的分切辊上。采用加载接触平动摩擦块模拟了轧辊与板料之间的相互作用。
沿着滑块移动的物体,并用平动扣动器保持在设定点上。物体悬浮在两个弹簧之间,并受粘性摩擦的影响。三个支点保持载荷在50,75和125毫米。峰值力分别为20 N、30 N和20 N。为了移动负载通过每个扣,推动负载的弹簧必须足够变形,以产生一个力,克服扣的持有力。
由三组弹簧和阻尼器组成的试验台,由相同的振荡速度源激励。第一种采用减震器块,包括线性刚度和阻尼。不使用可选的摩擦和硬止动。第二减振器采用非线性平动弹簧和由对称多项式指定的非线性平动阻尼器。第三种方法采用了可变平移弹簧和可变平移阻尼器。在仿真过程中,采用开环控制改变弹簧常数,调整阻尼系数,以确保达到临界阻尼。可以添加闭环控制来模拟自适应悬架系统。
一种由直流电机驱动并由双蹄闸控制的绞车。电机连接到24伏的电源,轴速度以10:1的齿轮减速下降。拉荷载模型为带滑动摩擦的质量。在6秒的模拟时间内,对一个内部双蹄闸施加力,使绞车停止。
次のMATLABコマンドに対応するリンクがクリックされました。
コマンドをMATLABコマンドウィンドウに入力して実行してください。WebブラウザーはMATLABコマンドをサポートしていません。
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系
無料評価版のダウンロード