直流电机伺服控制器的鲁棒性
此示例显示如何在强大的控制工具箱™中使用不确定的对象来模拟不确定系统,并使用鲁棒性分析工具评估强大的稳定性和鲁棒性能。
用于不确定性建模的数据结构
强大的控制工具箱允许您创建不确定的元素,例如物理参数,其值尚未完全知道,并将这些元素与不确定的模型组合成。然后,您可以轻松分析不确定性对控制系统性能的影响。
例如,考虑一个植物模型
在哪里伽玛可以在间隔中的范围[3,5]和τ平均值为0.5,变异性为30%。你可以创建一个不确定的P(s)模型,如下所示:
gamma =尿尿('伽玛'4'范围'[3 - 5]);τ=尿素的('tau'5,'百分比',30);p = tf(伽玛,[tau1])
P =具有1个输出的不确定连续时间状态空间模型,1个输入,1个状态。模型不确定性由以下块组成:伽玛:不确定的真实,标称= 4,范围= [3,5],1个出现Tau:不确定真实,标称= 0.5,可变性= [-30,30]%,1种类型“p.nominalvalue”看标称值“get(p)”以查看所有属性,以及“p.uncertainty”与不确定的元素互动。
假设您设计了一个整体控制器C对于名义植物(伽玛= 4且τ= 0.5)。找出如何变化伽玛和τ影响装置和闭环性能,形成闭环系统CLP.从C和P.。
KI = 1 / (2 * tau.Nominal * gamma.Nominal);C = tf(KI,[10]);CLP =反馈(P * C, 1)
CLP =不确定的连续时间 - 空间模型,具有1个输出,1个输入,2个状态。模型不确定性由以下块组成:伽玛:不确定的真实,标称= 4,范围= [3,5],1个出现Tau:不确定真实,标称= 0.5,可变性= [-30,30]%,1种类型“clp.nominalvalue”看标称值,“get(clp)”查看所有属性,以及“clp.unctainty”与不确定的元素互动。
绘制电站和闭环系统的阶跃响应。这步命令自动生成20个不确定参数的随机样本伽玛和τ并绘制相应的步骤响应。
次要情节(2,1,1);步骤(P)、标题('植物反应(20个样本)'次要情节(2,1,2);步骤(CLP)、标题('闭环响应(20个样本)')

图1:电站的阶跃响应和闭环模型
底部的图表明,闭环系统是合理的鲁棒,尽管电站直流增益显著波动。这是一个合理设计的反馈系统所需要的和共同的特性。
DC电机示例具有参数不确定性和未拼接的动态
此示例在示例中构建具有参数变体的直流电动机的参考跟踪通过添加参数不确定性和未拼接的动态,以研究伺服控制器的鲁棒性,以这种不确定性。
直流电机的公称模型是由电阻来定义的R.,电感L.,EMF常数Kb,电枢常数公里,粘性摩擦的线性近似Kf惯性载荷j。这些组件中的每一个在特定的值范围内变化。电阻和电感常数范围在其标称值的±40%内。用尿尿来构造这些不确定参数。
R =尿素的('r'2,'百分比',40);l =尿尿(“L”, 0.5,'百分比',40);
由于物理原因,的值Kf和Kb也是如此,即使他们不确定。在该示例中,标称值为0.015,范围为0.012和0.019。
K =尿素的(“K”,0.015,'范围',[0.012 0.019]);km = k;kb = k;
粘滞摩擦,Kf,标称值为0.2,其值的50%变化。
kf =尿尿('kf',0.2,'百分比', 50);
电气和机械方程
电路中的电流和施加到转子的扭矩可以以施加的电压和角速度表示。创建传递函数H与这些变量相关,并制作Angularspeed一个输出H以备后用。
H =[1、0公里]*特遣部队(1 (L R)) * [1 kb] + [0 0; 0 1; 0 kf);H.InputName = {“AppliedVoltage”;“AngularSpeed”};h.outputname = {“当前”;“AngularSpeed”;“RotorTorque”};
电动机通常驱动惯性,其动态特性将施加的扭矩涉及角速度的变化率。对于刚体,该值是恒定的。更现实,但不确定,模型可能包含未知的阻尼共振。使用ultidyn用于建模不确定线性定常动力学。将刚体惯性的标称值设为0.02,在乘法形式中包含15%的动态不确定性。
j = 0.02 *(1 + ultidyn('jlti',[1 1],'类型'那“GainBounded”那“约束”,0.15,......“SampleStateDim”,4));
直流电动机的不确定模型
有一个简单的问题是相关的Angularspeed输入到Rotortorque.输出通过不确定的惯性,j, 使用l命令。这Angularspeed输入=Rotortorque /(J * S)。因此,使用从第三个输出到第二个输入的“正”反馈H建立连接。此连接导致具有一个输入的系统(AppliedVoltage.)和两个输出(当前的和Angularspeed)。
Pall = lft(H,tf(1,[1 0])/J);
只选择它Angularspeed输出用于控制分析的其余部分。
p = pall(2,:)
P =具有1个输出的不确定连续时间状态空间模型,1个输入,2个状态。模型不确定性包括以下块:JLTI:不确定1x1 LTI,峰值增益= 0.15,1出现k:不确定真实,标称= 0.015,范围= [0.012,0.019],2个出现Kf:不确定真实,标称= 0.2,变异性= [-50,50]%,1个出现l:不确定真实,标称= 0.5,变异性= [-40,40]%,1个出现R:不确定真实,标称= 2,变异性= [-40,40]%,1次出现“p.nominalValue”,以查看标称值,“get(p)”以查看所有属性,以及“p.uncertainty”与不确定元素交互。
P.是一种单输入、单输出的不确定直流电机模型。为了便于分析,请使用以下控制器。
cont = tf(84 * [。233 1],[。0357 1 0]);
开环分析
首先,比较标称直流电动机的步进响应,具有15个样本的直流电机的不确定模型。用usample.明确指定随机样本的数量。
CLF步骤(USAMPLE(P,15),P.NOMINALVALUE,3)传奇('样品'那“名义”)
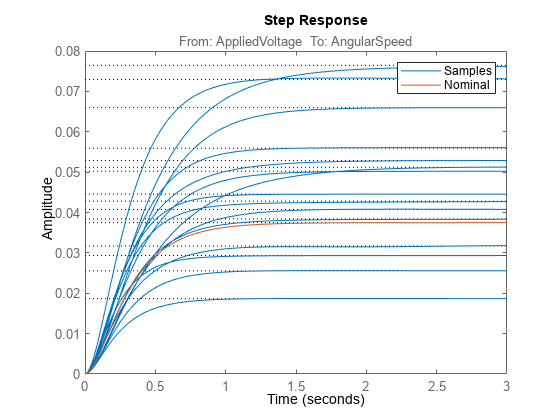
图2:工厂阶跃反应
同样,比较直流电机公称(红色)和采样(蓝色)不确定模型的波德响应。
波德(usample (P, 15), P.NominalValue);传奇('样品'那“名义”)
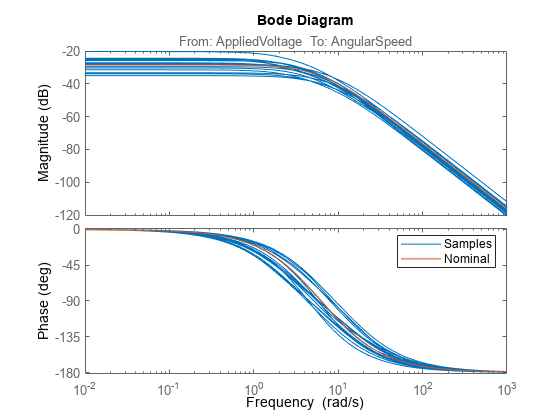
图3:植物博德响应
鲁棒性分析
在本节中,分析直流电机控制器的稳健性。闭环系统的标称分析表示反馈回路非常坚固,具有22 dB增益余量和66°的相位余量。
边缘(p.nominalvalue *续)
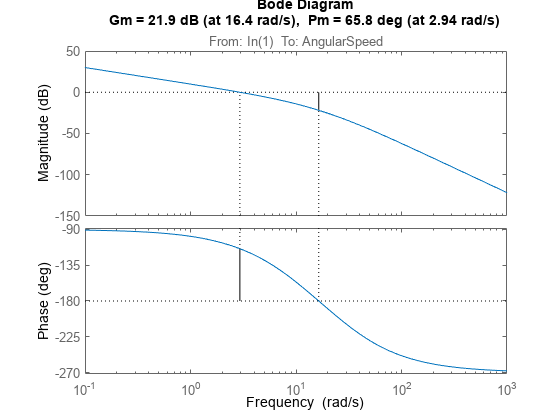
图4:闭环鲁棒性分析
这diskmargin.功能计算基于磁盘的增益和相位边距。通过在所有频率和所有反馈循环中建模增益和相位变化,磁盘边距往往更准确地稳健,特别是在多环控制系统中。计算DC电机环路的基于磁盘的边距。
DM = diskmargin (P.NominalValue *续)
DM =结构与字段:GainMargin:[0.2792 3.5822] PhaseMargin:[-58.8054 58.8054] DiskMargin:1.1271下行:1.1271上行:1.1271频率:5.0062谷物谷次:[1x1 SS]
虽然小于经典的增益和相位裕度,但基于磁盘的裕度基本上证实了名义反馈回路是非常稳健的。现在,回想一下,直流电动机工厂是不确定的。模型的不确定性如何影响这些稳定边际?为了快速了解,绘制基于磁盘的增益和相位裕度为20个样本的不确定开环响应。
diskmarginplot(p * cont,p.nominalvalue *续)传奇('样品'那“名义”)
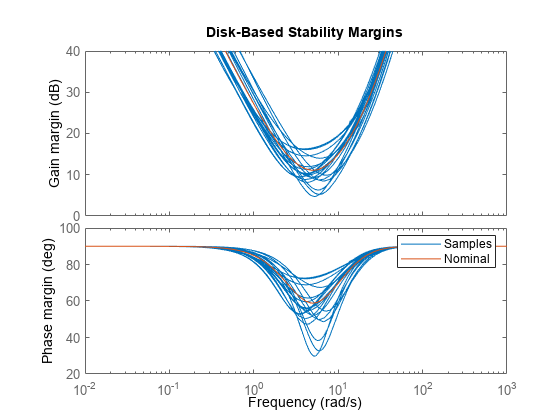
植物不确定性的一些组合导致更小的边缘。该曲线仅显示一个小样本。使用最坏的情况分析来了解利润率真正有多糟糕。这wcdiskmargin函数直接计算最坏情况增益和相位裕度为模型的不确定性。
wcDM = wcdiskmargin (P *续,'siso')
wcDM =结构与字段:GainMargin: [0.8728 1.1457] phasmargin: [-7.7680 7.7680] DiskMargin: 0.1358 LowerBound: 0.1358 UpperBound: 0.1361 CriticalFrequency: 4.9846 worst摄动:[1x1 ss]
MAG2DB(WCDM.GainMargin)
ans =.1×2-1.1812 - 1.1812
这里,最坏情况的边距仅为1.2 dB和7.8度,信号传达闭环几乎不稳定,对于不确定元件的某些组合。
扰动抑制特性的鲁棒性
灵敏度函数是反馈系统闭环性能的标准度量。计算不确定灵敏度函数S.并比较标称和采样不确定敏感性功能的凸型幅度图。
S =反馈(1,P *续);Bodemag(S,S.Nominal)传奇('样品'那“名义”)
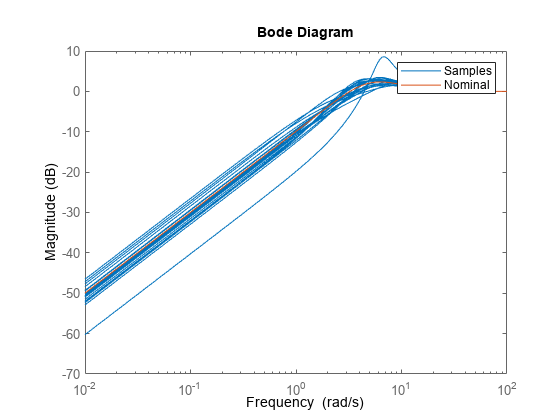
图5:灵敏度函数的幅度S.
在时域中,灵敏度函数表示可以拒绝阶跃干扰的程度。绘制其阶梯响应,以了解干扰抑制特性的变异性(标称出现在红色中)。
步骤(年代,S.Nominal)标题(“干扰拒绝”) 传奇('样品'那“名义”)
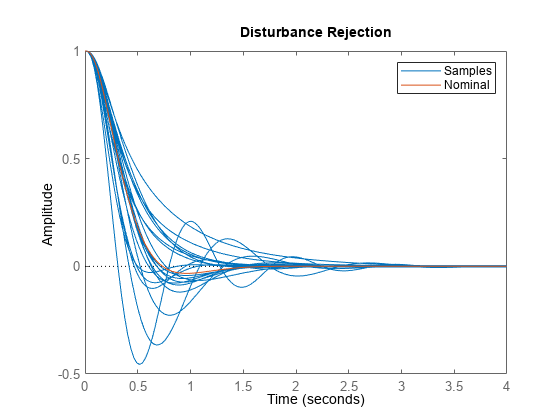
图6:拒绝一步干扰。
使用Wcgain.函数来计算灵敏度函数的峰值增益的最坏情况值。
[Maxgain,Worstuncertainty] = WCGAIN;最大
maxgain =.结构与字段:下行:7.5186上行:7.5344关键频率:4.9955
与USUB.功能您可以将不确定元素的最坏情况值替换为不确定的灵敏度函数S.。这给出了最坏情况的灵敏度函数Sworst.在整个不确定性范围内。注意峰值增益Sworst.匹配由较低的计算Wcgain.。
Sworst = usubs(年代,worstuncertainty);规范(Sworst正)
ANS = 7.5186.
maxgain。L.owerBound
ANS = 7.5186.
现在比较标称和最坏情况敏感性的步骤响应。
步骤(SWORST,S.NOMINALVALUE,6);标题(“干扰拒绝”) 传奇('最糟糕的情况'那“名义”)
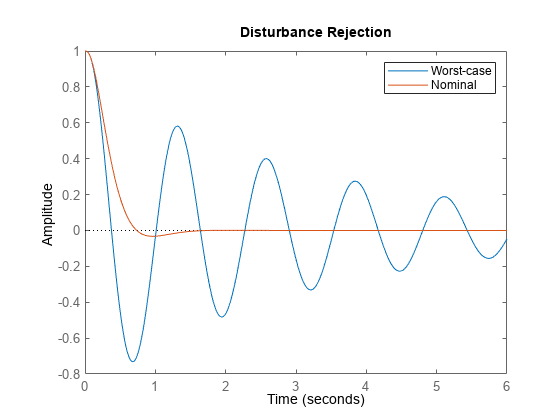
图7:一步干扰的标称和最坏的拒绝
显然,不确定元素的一些组合显着降低了控制器快速拒绝干扰的能力。最后,绘制敏感函数的标称和最坏情况值的大小。观察到峰值Sworst.发生在频率maxgain.criticre.:
bodemag (Sworst S.NominalValue)传说('最糟糕的情况'那“名义”)举行在semilogx(maxgain.critictfrequency,20 * log10(maxgain.lowerbound),'G*')
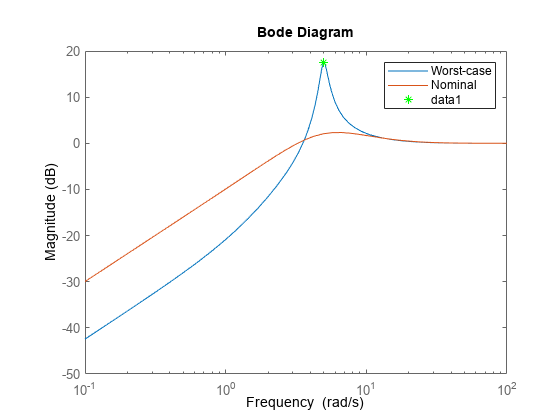
图8:标称和最差的敏感度的幅度
也可以看看
diskmargin.|号航空母舰|USUB.|Wcgain.
相关的话题
你也可以从以下列表中选择一个网站: