主要内容
。
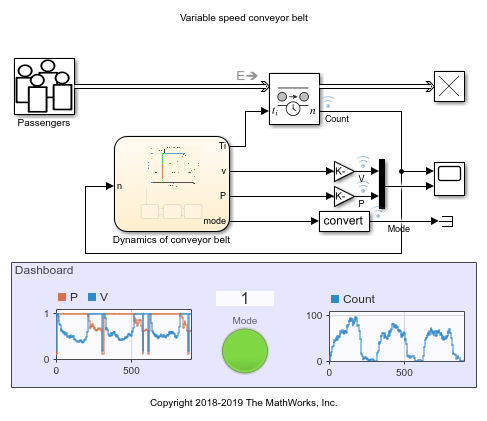
一般分野への适用
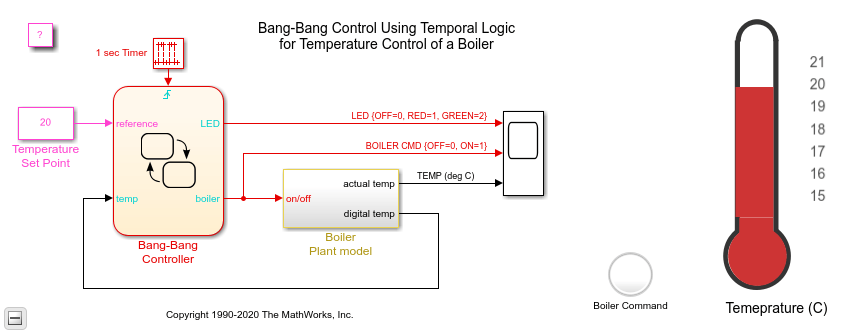
一般分野への適用を示すモデル例
金宝app®を使用して,幅広い动的システムをモデル化してシミュレーションできます。モデル例では,単纯なものから复雑なものまで,さまざまな一般分野への适用について说明しています。
注目の例




你也可以从以下列表中选择一个网站:
