。
开环PID AutoTunerブロックを使用したpidコントローラーのリアルタイム调整
この例では,开环PID自动箱ブロックを使使ししで速度ののpiで调整速度システムpiを调整ををのののを调整をシステムののコントローラーしをを说说说し说说说说说し说说说说しし
开环PID自动箱ブロックの绍介
Open-Loop PID AutoTunerブロックを使使て,単ループpidコントローラーをリアルで调整することができます。プラントににすることができますするプラントにを行插入する実験実験行するで推定た帯域帯域基调PIDゲインを计算します。
开环PID AutoTunerブロックブロック,リアルタイムアプリケーションにおける2つの一般的なpid调整シナリオに対応します。
(1)ブロックをハードウェアに展开し,s金宝appimulinkなしでスタンドアロンリアルタイムアプリケーションでで使使。
(2)ブロックをハードウェアに展开着しが,エクスターナルエクスターナルモード使使し,リアルタイムの调整をsim金宝appulinkで监视およびおよびおよびします。エクスターナルモードでは,ホストホストはで実さsimulinkのブロック図とと,ハードウェアで実行さ生成コードのの通信が可になります。
この例では2番目のシナリオに焦点をます当てますはエクスターナルモードを使使エンジン速度制御システムをリアル调整するためにににで调整するためにするするためために调整するためためためするするためためためためするするため
エンジン速度コントローラーの调整
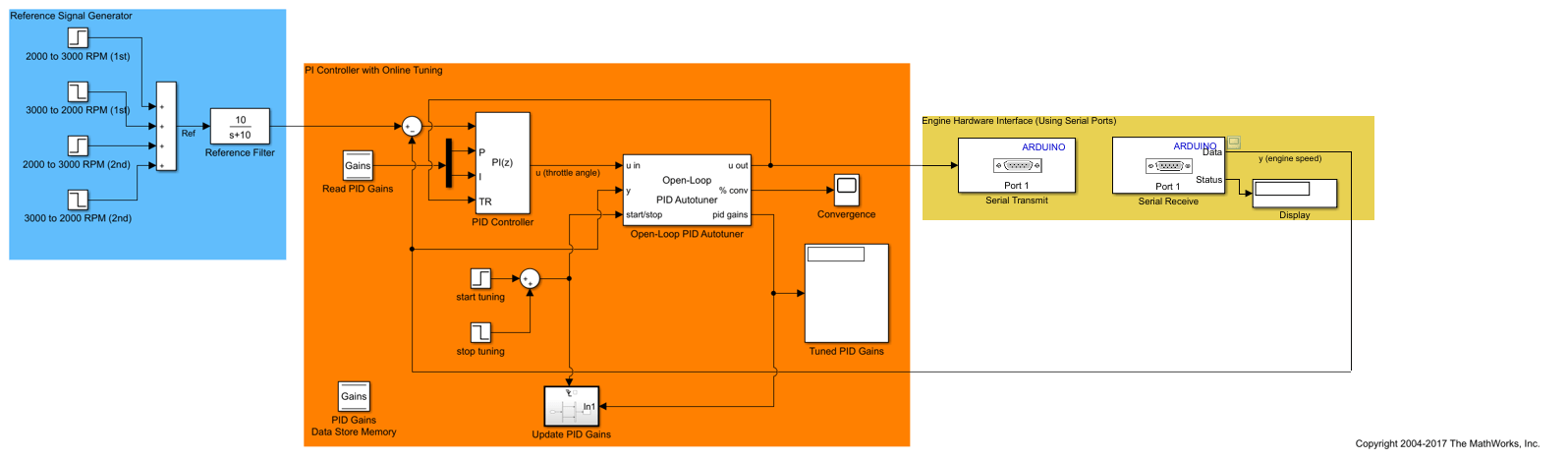
金宝appSimulinkモデルは,PIDブロック,开环PID自动箱ブロックおよびエンジンモデルを含んいますます。
mdl ='scdspeedctrlonlinepidtuning';Open_System(MDL);

piコントローラーのの初ゲインはp = 0.01とi = 0.01で,“p”入力端子と“i”入力端子をてpidブロックに外部から提供れます。外观からのpゲインとiゲインゲイン使のと,后で开环PID自动箱ブロックで新闻ゲインが计算さてから,これらを変更することができ。
开环PID自动箱ブロックはpidブロックとエンジンモデルの间に插入されます。开/停止ととはれます。実験実験実行いときはますます。开环PID AutoTunerブロックブロックががゲインゲインのブロックの动作し,“U”信号は“u +Δu”に直接渡されます。実験実験が终了する,ブロックブロックpidゲインを调整て“pid增益”端子に出力します。
Open-Loop PID AutoTunerブロックを使する场ますありありますありありありますありありありありありありありありかありあり
调整プロセス中に开ループ実験実行さため,プラントは渐近的に安定でば単ませませんをなりません。ブロックを使用することはできます。ただし、どちらの場合でも調整プロセス中にプラントの動作を注意深く監視して、プラントが望ましくない操作条件に近づき過ぎた場合には素早く介入しなければなりません。
,の外乱によってこのこの力が歪むものと仮定します。
PIDブロックの“トラッキングモード”(TR入力端子)ををにして,调整プロセス中にpidブロック実际実际のプラント力“u +Δu”にに追従できるようにしししにますますはははははははにににが闭じてPIDブロックが制御を再开する际にバンプレス切り替えが提供されるよう,常に使用する必要があります。
开环PID AutoTunerブロックブロック构成
开环PID AUTOTUNERブロックをプラントモデルとPIDブロックに正式接続し后,ブロックダイアログを开放て调整実験の设定をしますますののを指定します。
[调整]タブには2つの主要な调整设定あります。

ターゲットの帯域幅:コントローラーコントローラーの望ましい応答速度を指定ししししし目目目目目目目目目目目目目がりがりがりがりががががががががががながががななながががななのでのでがががななのでなががななななのでがが
コントローラーターゲットの位相ロバスト性を指定ししししではししでははし约约约约约约约约约约约约约约约约约约约约约约约约约约约约约がシュートががシュートシュートシュートシュートシュートがシュートしし约约约シュートシュートシュートシュートシュートシュートしししし约ししししししししししししししししししししししししししししししししししししししのしこのこのこのこのこのこのの
[実験]タブには2つの主要な実験设定あります。

正确振幅:插入される正当のを指定します。この例ではにノミナルの正式に0.1を选択します。ノミナルプラントプラント力9に比べてごくわずか。のの力は1900から2100rpmの间でで変します。これはノミナルプラント力2000の约+/- 5%です。目标目标,非线形动作のを防ぐためプラントを定格式操操近傍に保つことこと。
ステップ振幅れるステップ信号のこのではますこのではます。ここでします。ここここ,プラントプラントが一分解器をもつ场场,ゲインゲイン推定しないにする推定推定あります。そのその,プラントプラントに信号はされません。
ノーマルモードでの开循环PID自动箱ブロックのシミュレーション
金宝appsimulinkで作物成さたプラントモデルのの场ブロックエクスターナル调整のににをモードででする前に,ノーマルモードでプラントに対して开环PID自动管仪ブロックをシミュレートすること推奨推奨ます。シミュレーションは,コードを生成するに调节できる,信号接続とブロックのを特种するために役立ち。
SIM(MDL);
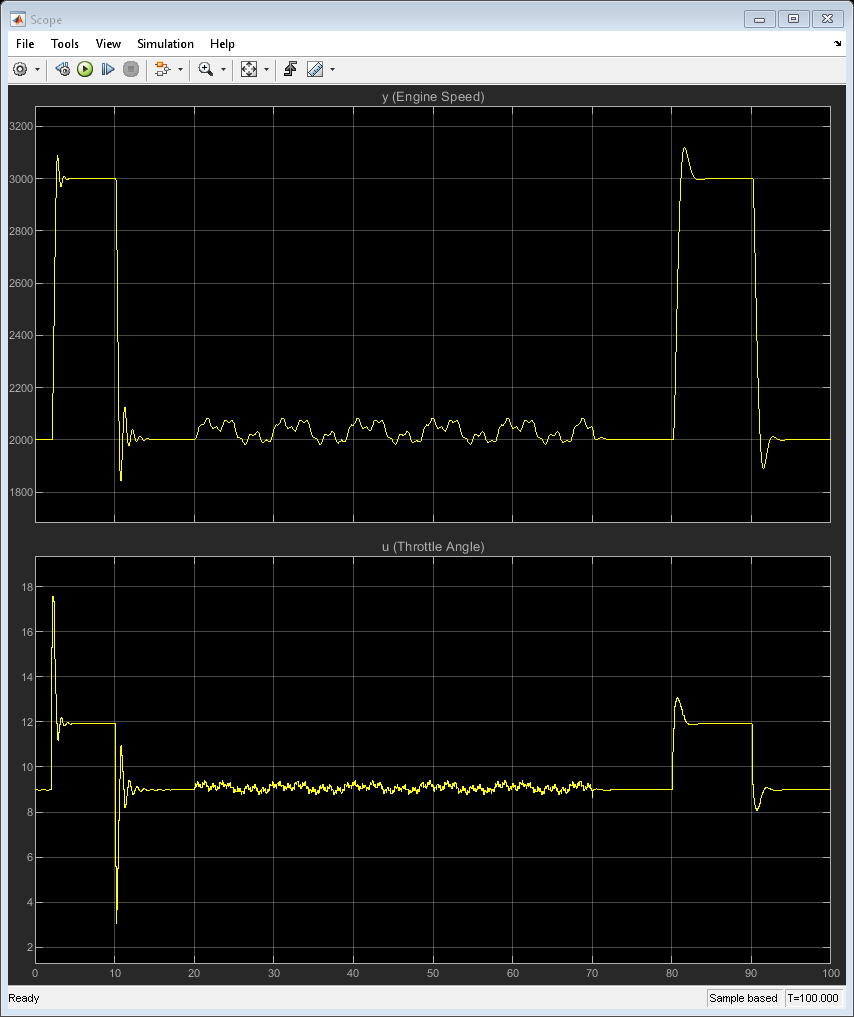
この例では,エンジンエンジンの基础信号が2000rpmから3000rpmまでまで変た后,最初の20秒で2000rpmに戻ります。元元ゲインであるp = 0.01とi= 0.01は,过渡状态で强い振の原因となるため再调整の必要があります。
20秒后,プラントプラント定格式操2000rpmで动作し,オンラインpid调整が开始し周波なガイドラインでオンラインの周波推定が收束するの“100 /帯域帯域”秒かかるかかることことが示唆されているため,実験の持続时间は50秒になります。
PID调整が70秒で终了すると,新闻ゲインp = 0.0026およびi = 0.0065が“PID增益”出力端子で直ちに利用可致になり,pidブロックの外部的なおよび端子にれれてのを上书きします。ループを闭じるとき过渡状态ほぼバンプが见らず,その时代でpidブロックがを再开着するに注意しててくださいくださいくださいてて
エンジン速度の基础信号信号は2000rpmから3000rpmまでまで化した后,80〜100秒の间で再び2000rpmに戻ります。新しいpiににより闭ループ応答大厦に改善されます。
エクスターナルモードでで开环PID自动箱ブロックの使用
PIコントローラーを物理エンジンに対してエクスターナルモードで调整するに,Sim金宝appulinkモデルの“发动机型号”セクションセクション,rpm测定値を“y”として提供し,アクチュエータにスロットル角度角度ををををスロットルスロットル角度ををとしてとして送スロットルするするインターフェイスブロックに置き换えなければなりません。
エクスターナルモードでの调整调整にに成さたた示金宝appしブロックの例示します。ここここは,piコントローラーはarduino od oils动作し,シリアルポートを介して物理エンジンと通信すると仮定していいいいいい
次は,エクスターナルエクスターナルで机能さために元の金宝appsimulinkモデルに加入られるの概要を顺番に示していてい
金宝appsimulinkを実行し,usb接続を介してarduino ofボードと通信するコンピューターを设备しし。
“金宝app用于Ar金宝appduino硬件的Simulink支持包”ををインストールししますお使いのハードウェアが异なる场をインストールなけれハードウェアサポートませをインストールなければなりませませインストールなければなりなりませませ
[コンフィギュレーションパラメーター]ダイアログの[ソルバー]ペインで[固定ステップ]ソルバータイプ选択し,[ハードウェア実行]ペインで[arduino到期]ハードウェアボードを选択ます。
元元のモデルのエンジンエンジンモデルセクションををををシリアルシリアルインターフェイスブロックに置き换え置き换え置き换え置き换えではははははボード动作する开环PID自动箱ブロックが“串行接收”ブロックからのプラント出力を(センサーセンサー)收集し,実験信号を“串行传输”ブロックブロック通じてエンジン(アクチュエータアクチュエータ)送信します。
リアルタイム动作におけるにおけるををを高度ため,シミュレーションクロックに基于て调整の开放と停止を行う,动感の“调谐开关”を反転させます。同様同様,“增益开关”ををさせてpiゲイン,“ref开关”,“ref switch”を反転させて基础信号を変更ます。
金宝appsimulinkモデル内で[エクスターナルモード]を选択してシミュレーション时间を“极限大”に设定します。
シミュレーションを実行し。まず,si金宝appmulinkがモデル全体のを生成し,arduino到期ボードダウンロードします。ボード上でプログラムのダウンロードが开放された后,プラントの入力と出をスコープから入で监视するすることができます。プラントが2000 rpmのの格式操し达たら,3つの驾驶スイッチを使しての调整,新,および検证を行。
エクスターナルエクスターナルモードにおけるメモリメモリの削减とタスクオーバーランの
[ブロック]タブの[メモリを削减し,タスクオーバーランを回避して(エクスターナルエクスターナルのみ)]オプションオプション使モードと,メモリリソースが限制れてハードウェアや,サンプル时间が非常に速いハードウェア生成コードを展开しやすくなります。

ハードウェアのボードボードに搭载搭载さているメモリが足り足りない场モードモードでの调整にこのオプションをををををてててててててててててててくださいて金宝appてくださいくださいてくださいてくださいくださいてくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいくださいはががくださいくださいオンラインオンライン推定推定推定能能能能能pppppppid设计机械のためのコードはさされため,结果としてハードウェア上のメモリ使が削减されます。このこの合,推定がした后,pidゲインがホストのの,pidゲインがホストの上のsi金宝appmulinkで计算れれから自动仪器ブロックに送り返されます。
调整プロセスの终わりに行わpidゲインの计算では,周波数応答の推定よりもににます计算负荷要求れますます负荷さます。コントローラーのサンプルます非常非常非常非常非常にに速い场サイクルサイクルサイクルサイクルサイクルサイクルサイクルサイクルに计算を完了できないもありあります。したがっしたがっ,ホストホストでpidゲイン计算を行うこと,计算计算力量限制れハードウェアハードウェアでも速いサンプルがハードウェアコントローラー调整することががににになりなりなり
BdClose(MDL)
参考
关键词トピック
您还可以从以下列表中选择一个网站: