具有无人机制导模型块的近似高保真无人机模型
在不同的开发阶段,仿真模型通常需要不同的逼真度。在快速原型阶段,我们希望快速试验和调整参数,以测试不同的自主算法。在产品开发阶段,我们希望通过提高保真度的模型来验证我们的算法。在这个例子中,我们演示了一个方法来近似一个高保真模型制导模型拦截并使用它来原型化和调整航路点跟踪导航系统。看见固定翼无人机航路点跟随器调整. 同一导航系统在高保真模型上进行了测试,以验证其性能。
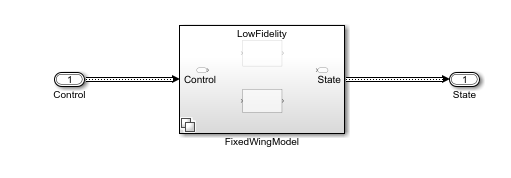
示例模型使用高保真无人机(UAV)模型由一个工厂模型和一个中级内置自动驾驶仪组成。该模型包含近千个模块,使用起来相当复杂。作为开发过程的第一步,我们创建了一个变体系统,可以在高保真模型和无人机制导模型模块之间切换。高保真模型被提取从文件交换条目中删除,金宝appSimulink无人机参考应用程序.
不同保真度的无人机模型
UAV模型=“FixedWingModel.slx”;open_system (uavModel);
您可以通过更改与该模型相关的数据字典中存储的MATLAB®变量值,在低保真度和高保真度模型之间进行切换。
plantDataDictionary=Si金宝appmulink.data.dictionary.open('PathFollowData.sldd');plantDataSet = getSection (plantDataDictionary,“设计数据”);%切换到高保真模型assignin (plantDataSet“useHighFidelity”1);

%切换到低保真度模型assignin (plantDataSet“useHighFidelity”, 0);
近似高保真固定翼模型与低保真制导模型
要使用UAV制导模型块近似高保真模型,请创建阶跃控制信号,以输入模型,并观察阶跃响应滚转角,身高和空速命令。
阶梯模型=“stepResponse”;open_system (stepModel)

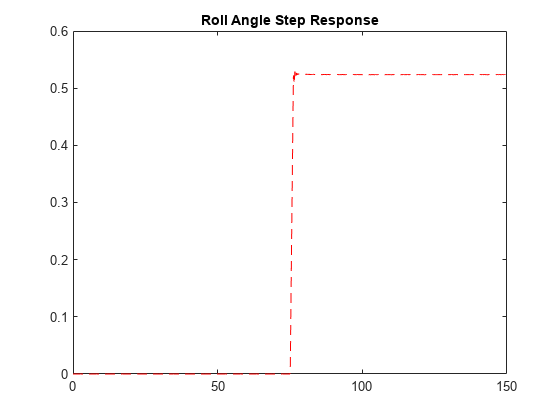
首先,命令更改滚动角度。
controlBlock=获取参数(“阶跃响应/阶跃控制输入”,“对象”);控制块。步进控制=“滚动角度步进控制”;分配(工厂数据集),“useHighFidelity”1);sim (stepModel);
###成功更新了模型参考仿真目标为:模型重建行动的原因 ======================================================================================== PlantModel PlantModel_msf代码生成和编译。Mexa64并不存在。生成和编译的代码Mexa64并不存在。建造时间:0小时1米50.029秒
highFidelityRollAngle=RollAngle.Data(:);highFidelityTime=滚动角度时间;figure()图(highFidelityTime,highFidelityRollAngle,“--r”);头衔(“滚动角度阶跃响应”)
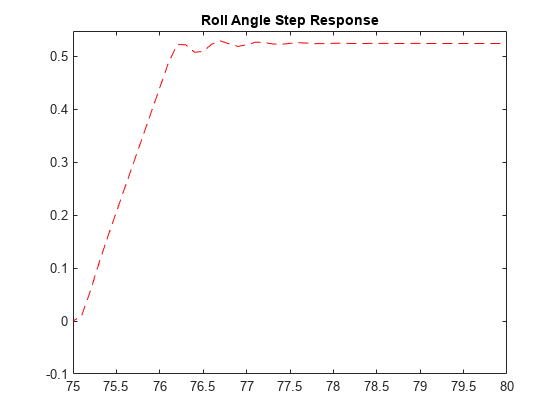
放大上面的模拟结果,可以看到高保真模型中内置的滚动角度控制器的特性。滚动角的设定时间接近2.5秒。
xlim([75 80])ylim([-0.1 0.548])
对于二阶PD控制器,为了在临界阻尼系统中实现此稳定时间,应使用以下增益在无人机模型的低保真变型内配置无人机制导模型块。对于本例无人机指导模型块是使用代码生成来模拟的,以提高多次运行的速度。请参见块参数。
ζ= 1.0;%临界阻尼t = 2.5;%2%的沉淀时间wn=5.8335/(ts*zeta);newRollPD=[wn^2*zeta*wn];
设置新的增益并模拟低保真度模型的阶跃响应。将它与最初的响应进行比较。
load_system uavModel set_param (“固定翼模型/固定翼模型/低保真度/固定翼无人机制导模型”,...“PDRollFixedWing”,strcat('['num2str (newRollPD),']'))保存系统(uavModel)分配(plantDataSet,“useHighFidelity”, 0); sim(stepModel);
###启动串行模型参考仿真构建###成功更新了模型参考仿真目标:模型重建行动的原因 =========================================================================================== FixedWingModel代码生成和编译模型或图书馆FixedWingModel已经改变了。建造时间:0h 0m 23.146s
lowFidelityRollAngle = RollAngle.Data (:);lowFidelityTime = RollAngle.Time;持有在…上; 绘图(lowFidelityTime,lowFidelityRollAngle,“-b”);传奇(“高保真响应”,“低保真反应”,“位置”,‘东南’);
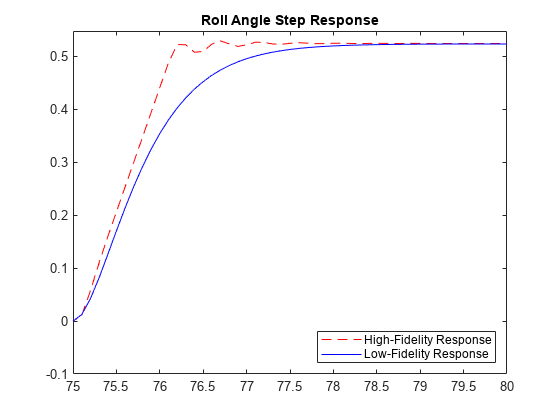
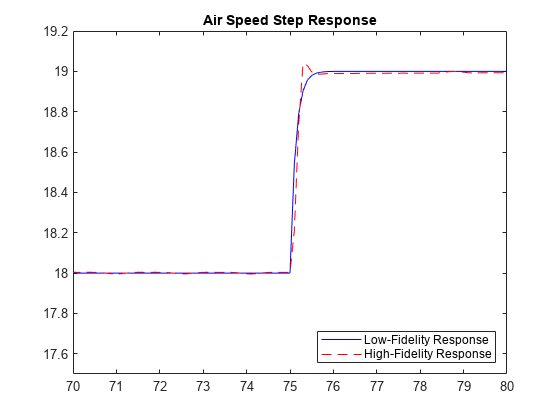
低保真度模型实现了类似的阶跃响应。类似地,我们可以调整其他两个控制通道:身高和空速这里可以使用更复杂的方法来优化控制增益,而不是对控制响应的视觉检查。考虑使用系统识别工具箱®来执行高保真无人机模型行为的进一步分析。
步进控制=“空速步进控制”;分配(工厂数据集),“useHighFidelity”, 0); sim(stepModel);
###开始串行模型参考仿真构建####固定翼模型的模型参考仿真目标是最新的。生成摘要已生成1个模型中的0个(1个模型已更新)生成持续时间:0小时0米3.5756秒
lowFidelityAirSpeed=空速.Data(:);lowFidelityTime=空速.Time;assignin(plantDataSet,“useHighFidelity”, 1); sim(stepModel);
###开始串行模型参考仿真构建####PlantModel的模型参考仿真目标是最新的。###已成功更新以下对象的模型参考仿真目标:FixedWingModel生成摘要生成的仿真目标:模型操作重建原因===================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================================值已从true更改为false。构建的2个模型中的1个(1个模型已更新)构建持续时间:0h 0m 39.077s
highFidelityAirSpeed=空速。数据(:);highFidelityTime=空速。时间;figure()绘图(lowFidelityTime,lowFidelityAirSpeed,“-b”);持有在…上;绘图(highFidelityTime、highFidelityAirSpeed、,“--r”);传奇(“低保真反应”,“高保真响应”,“位置”,‘东南’);头衔(“空气速度阶跃响应”)xlim([70 80])ylim([17.5 19.2])
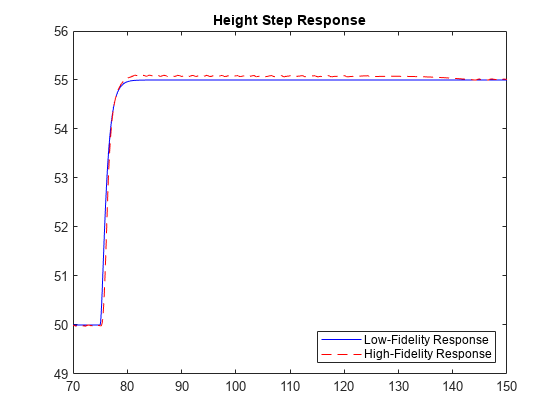
步进控制=“高度的一步控制”;分配(工厂数据集),“useHighFidelity”, 0); sim(stepModel);
###启动串行模型参考仿真构建###成功更新了模型参考仿真目标:模型重建行动的原因 ========================================================================================================================= FixedWingModel控制代码生成和编译变体useHighFidelity = = 1价值已经从真为假。建造时间:0小时0米20.75秒
lowFidelityHeight = Height.Data (:);lowFidelityTime = Height.Time;assignin (plantDataSet“useHighFidelity”, 1); sim(stepModel);
###开始串行模型参考仿真生成####PlantModel的模型参考仿真目标是最新的。####已成功更新模型参考仿真目标:FixedWingModel生成摘要仿真目标生成:模型操作重建原因================================================================================================================================生成和编译的FixedWingModel代码变量控件useHighFidelity==0值已从true更改为false。生成的2个模型中的1个(1个模型已更新)生成持续时间:0h 0m 39.47s
highFidelityHeight=Height.Data(:);highFidelityTime=Height.Time;figure()绘图(lowFidelityTime,lowFidelityHeight,“-b”);持有在…上;情节(highFidelityTime highFidelityHeight,“--r”);传奇(“低保真反应”,“高保真响应”,“位置”,‘东南’);头衔(“高度阶跃响应”) xlim([70 150]) ylim([49 56])
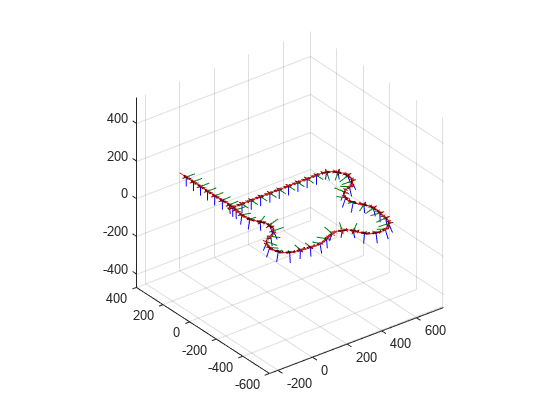
用低保真度模型测试导航算法
现在我们已经用无人机指导模型块,我们可以尝试用无人机制导模型块在固定翼无人机航路点跟随器调整的例子。针对不同保真度的模型,测试了前视距离和航向控制增益的影响。
导航模型=“pathFollowing”开放式系统(导航模型);
assignin (plantDataSet“useHighFidelity”, 0);sim (navigationModel);
###启动串行模型参考仿真构建###成功更新了模型参考仿真目标:模型重建行动的原因 ========================================================================================================================= FixedWingModel控制代码生成和编译变体useHighFidelity = = 1价值已经从真为假。建造时间:0小时0米22.108秒
图visualizeSimStates (simStates);
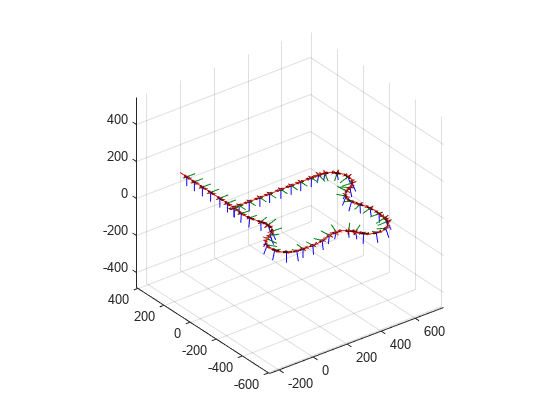
用高保真模型进行验证
assignin (plantDataSet“useHighFidelity”,1); sim(导航模型);
###开始串行模型参考仿真生成####PlantModel的模型参考仿真目标是最新的。####已成功更新模型参考仿真目标:FixedWingModel生成摘要仿真目标生成:模型操作重建原因================================================================================================================================生成和编译的FixedWingModel代码变量控件useHighFidelity==0值已从true更改为false。生成的2个模型中的1个(1个模型已更新)生成持续时间:0h 0m 38.247s
图visualizeSimStates (simStates);
结论
这个例子展示了我们如何用固定翼无人机的低保真抽象来近似高保真模型。相反的方法也可以用来帮助选择高保真模型的自动驾驶仪控制增益。您可以首先通过模拟低保真模型来确定自动驾驶仪控制响应的可接受特性在不同的测试传感器中,然后相应地调整高保真模型自动驾驶仪。
discardChanges (plantDataDictionary);清晰的plantDataSet清晰的plantDataDictionary关闭系统(uavModel,0);关闭系统(stepModel,0);关闭系统(navigationModel,0);
另见
相关话题
- 固定翼无人机航路点跟随器调整
- 探索Simuli金宝appnk总线功能(金宝appSimulink)
您还可以从以下列表中选择网站: